
Бесплатный фрагмент - Что должен знать и уметь оператор коптера
Пособие. Часть 5. Прошивка приемника ELRS, настройки конфигураторов
Список сокращений
1. Прошивка приемника ELRS: инструкция, обновление, биндинг
Одной из самых популярных и недорогих систем радиоуправления является Express LRS. Она имеет открытый исходный код, низкую задержку и возможность дальнего радиуса действия.
Версия прошивки ELRS обозначается номерами вида A.B.C:
A — номер основной версии
B — второстепенный номер версии
C — номер патча
Все выпуски с одинаковым основным номером версии кросс-совместимы, но не с разными основными версиями. Например, 2.0 работает с 2.1, 2.2, 2.5 и т.д., но прошивка 2.X.Х не привязывается к 3.X. Х. Кроме того, регион прошивки на приемнике и на передатчике должен быть ISM2G4 (на примере модуля 2,4 GHz).
Как узнать версию прошивки приёмника? Подключиться с компьютера или телефона по Wi-Fi к сети ExpressLRS RX с паролем по умолчанию expresslrs и перейти в браузере на адрес 10.0.0.1. Прошивка приёмника указана на открывшейся странице.
Если в «шапке» версия 3.X.X, то сопряжение с радиопередатчиком произойдёт успешно. Если же в «шапке» версия 2.X.X — требуется прошивка приёмника.
Бывают ситуации когда на приемнике прошивку не удаётся определить таким способом и в шапке прописано ver. unknown. В таком случае приемник следует перепрошить.
Есть несколько методик прошивки приёмника.
Ввиду того, что чаще всего компилируется сначала прошивка, а потом она загружается через браузер — рассмотрим эту методику.
Этапы методики:
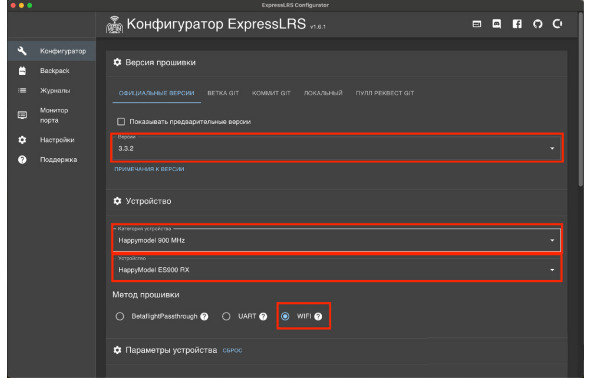
1. Устанавить программу ExpressLRS Configurator.
2. В программе ввести модель приёмника.
Для определения модели — осмотреть приемник и попробовать его идентифицировать или подключиться к нему описанном выше способом через браузер и посмотреть модель в шапке.

3. Эти данные, а так же версию прошивки ввести в программу ExpressLRS Configurator. Также, так как используется методика прошивки через браузер, поставить галочку на Wi-Fi.
4. Установить параметры сборки прошивки. Для приемников и передатчиков работающих на 2,4 GHz всегда ISM_2400, для работающих на 868 МHz — EU_868, на 866 МHz — IN_866. В данном случае на 900/915 МHz, поэтому FCC_915.
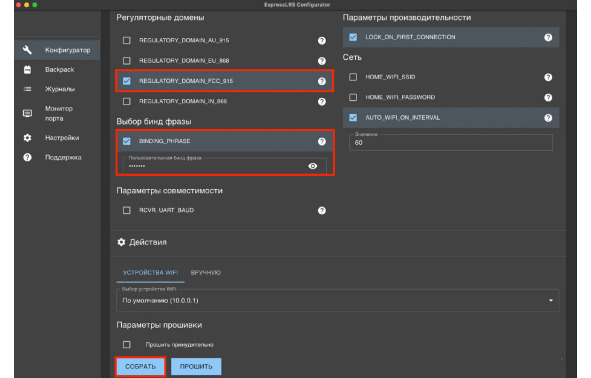
BINDING_PHRASE — фраза для привязки (и радиопередатчик, и приемник ДОЛЖНЫ иметь одну и ту же фразу для привязки, или ExpressLRS НЕ БУДЕТ РАБОТАТЬ!).
Функции HOME_WIFI_SSID и HOME_WIFI_PASSWORD потребуются если есть желание использовать другой метод прошивки — приемник будет самостоятельно подключаться к роутеру.
Значение AUTO_WIFI_ON_INTERNAL указывает через сколько секунд бездействия при подключённом на приемник питании он перейдёт в режим Wi-Fi.
Нажать «Собрать».
5. После того как прошивка скомпилируется, откроется проводник в папке, где будет файл firmware.bin. gz. Не закрывая это окно, сохранить этот файл в удобное место для последующей загрузки в приемник и обновления.
6. Снова подать питание на полетный контроллер и дождаться перехода приёмника в режим Wi-Fi (частое мигание светодиода).

.7. Подключиться с помощью компьютера к сети Wi-Fi ExpressLRS RX с паролем expresslrs и перейти в браузере на адрес 10.0.0.1.
Во вкладке Update выбрать свой новый файл прошивки и нажать Update.
При успешной прошивке появится окно подтверждения.
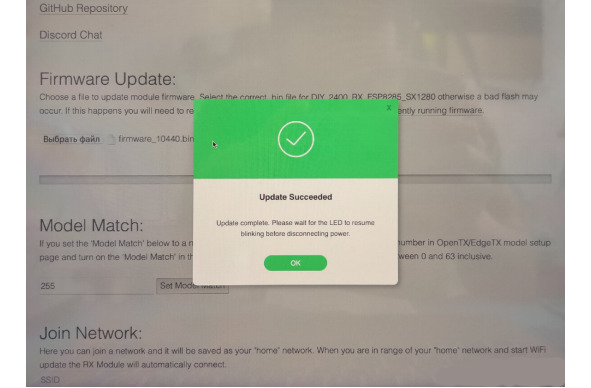
Подождать пока приемник перезагрузится и снова начнёт медленно мигать.
8. Переподать питание на полетный контроллер — приемник прошит.
9. Установить фразу привязки (Binding Phrase) для радиопередатчика:
— зажать кнопку SYS и выбрать ExpressLRS;
— выбрать пункт Wifi Connectivity и нажать Enable Wifi;
— нажать ОК еще раз, чтобы включить Wi-Fi на радиопередатчике;
— подключиться c помощью компьютера к сети ExpressLRS TX с паролем expresslrs и перейти в браузере на адрес 10.0.0.1;
— в поле Binding Phrase ввести такую же фразу привязки, как и в приемнике (по этой фразе приемник будет находить радиопередатчик);
— нажать «Сохранить»;
— подключить АКБ к БЛА, зажать кнопку SYS на передатчике и выбрать ExpressLRS;
BINDING_PHRASE — фраза для привязки (и радиопередатчик, и приемник ДОЛЖНЫ иметь одну и ту же фразу для привязки, или ExpressLRS НЕ БУДЕТ РАБОТАТЬ!).
Функции HOME_WIFI_SSID и HOME_WIFI_PASSWORD потребуются если есть желание использовать другой метод прошивки — приемник будет самостоятельно подключаться к роутеру.
— нажать на функцию BIND — происходит привязка пульта и приёмника (когда на приемник поступает питание, он ищет передатчик с соответствующей Binding-фразой, как только соединение будет установлено, оно синхронизируется и другое устройство не сможет к нему подключиться).

2. Установка и настройка программного обеспечения
Конфигуратор — это улита, предназначенная для прошивки, обновления и настройки полётного контроллера (ПК), установленного на квадрокоптере. Для работы с тем или иным конфигуратором необходимо, чтобы прошивка ПК ему соответствовала. То есть нельзя нормально настроить ПК с установленным INAV на конфигураторе Betaflight, хотя существуют конфигураторы, поддерживающие несколько вариаций прошивки такие, как Speedy Bee.
В части 4 Учебного пособия изложены вопросы установки и настройка прошивки полётного контроллера с использованием конфигуратора Betaflight.
В настоящей части изложены вопросы установки также актуальных конфигураторов INAV и Ardupilot, подключения приёмника ELRS к Ardupilot, сведения о прошивке приёмника ELRS, а также вопросы настройки конфигуратора Betaflight в режиме «Эксперт».
2.1. Настройка ПК с конфигуратором INAV
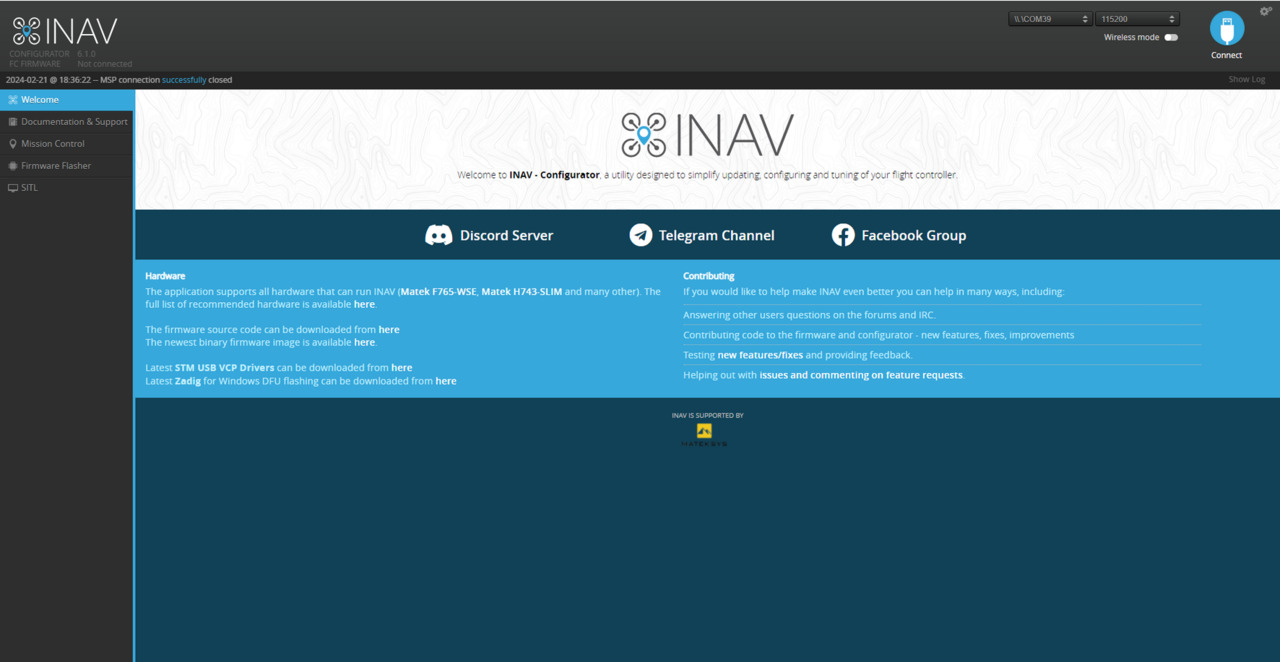
Если присмотреться, то функционал данного конфигуратора незначительно отличается от Bеtaflight. Поэтому, исходя из информации о Bеtaflight, INAV может быть установлен и настроен самостоятельно. Но следует иметь ввиду, что INAV не имеет русскоязычного меню и требует иметь конкретную версию конфигуратора под прошивку полётного контроллера.
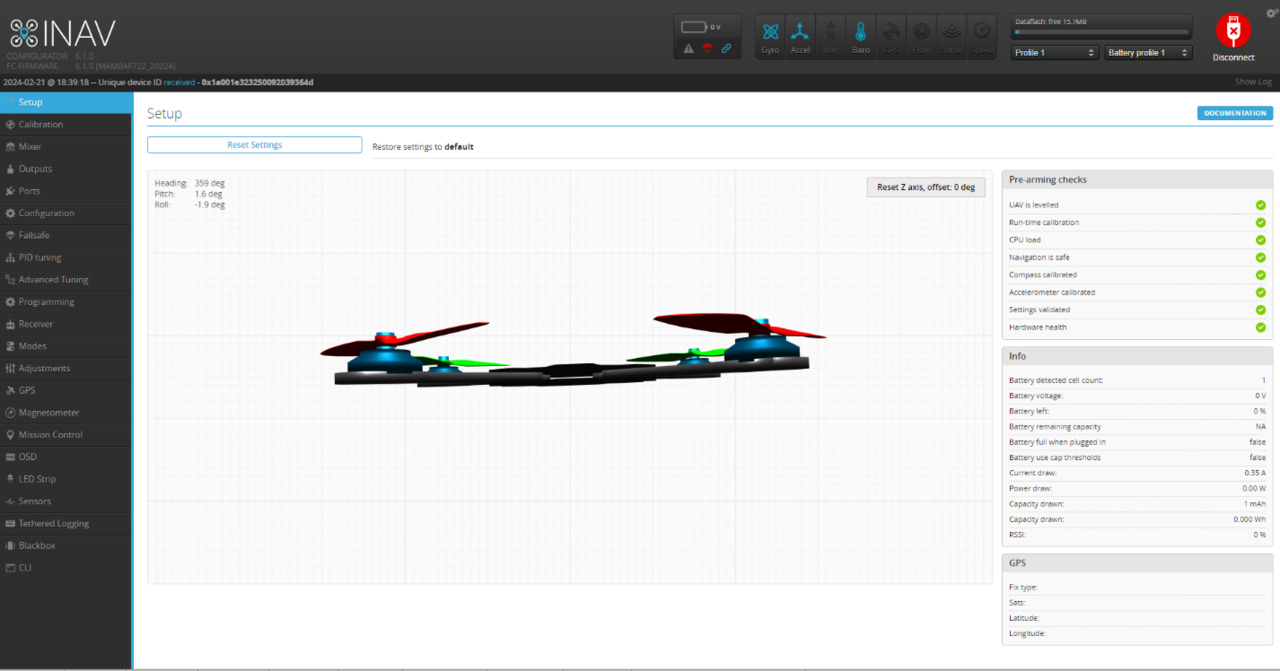
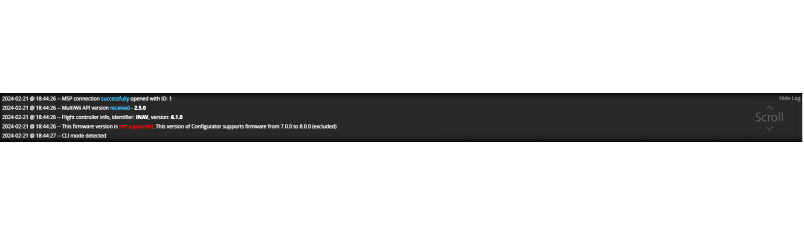
Пример расхождения версии конфигуратора и прошивки БЛА, где конфигуратор 7.1 не способен настраивать полетный контроллер с прошивкой INAV 6.1 предлагая только функционал командной строки:
2.2. Настройка ПК с конфигуратором Ardupilot
Ardupilot — это универсальный автопилот, обеспечивающий стабильность и высокую производительность БЛА любого типа. Его правильная конфигурация определяет, насколько точно он будет выполнять свои задачи. Для правильной конфигурации необходимо провести настройку конфигуратора. Ниже — порядок первоначальной настройки конфигуратора Ardupilot на полетном контроллере FPV-квадрокоптера до запуска моторов.
1. Убедиться в правильности установки ПК на FPV-квадрокоптере. Если стек — ESC + ПК, то соединение между собой происходит шлейфом из комплекта. Если сборка (ПК одного производителя, а ESC другой) или монтаж проводится через плату распределения питания — следует проверить правильность собранного шлейфа.
В рассматриваемом случае используются внешние ESC, подключённые через модуль питания Matek FCHUB-12S, поэтому положение проводов изменено.
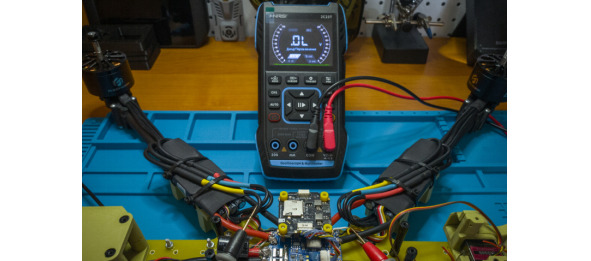
Обязательно проверить соединение мультиметром!
Убедившись, что все соединено правильно — приступить к настройке Ardupilot.
Если подключить сначала USB-провод к квадрокоптеру и загрузить Mission Planner, могут появляться ошибки о том, что не распознаётся какое-то оборудование, например компас, или барометр.
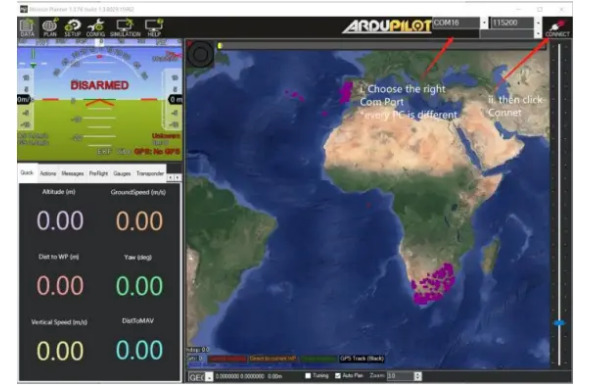
2. Подключить АКБ, через USB загрузить ПО Mission Planner.
Для этого выбрать COM-порт подключения и нажать CONNECT.
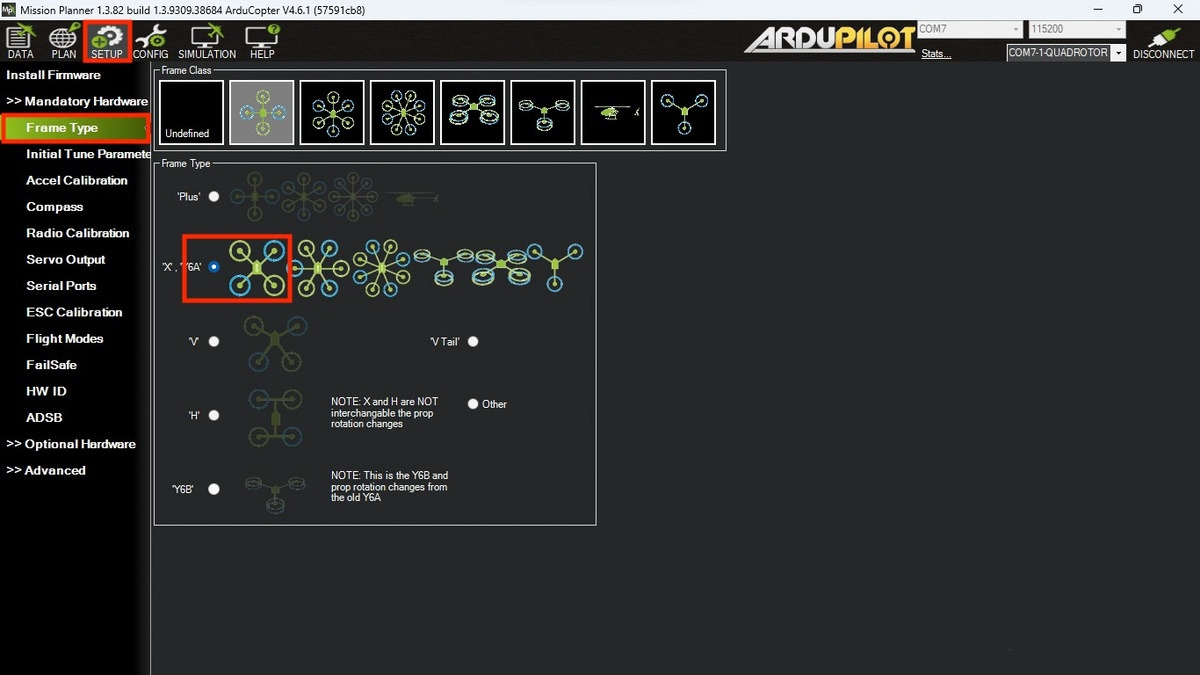
3. Перейти в раздел SETUP, выбрать пункт FRAME TYPE и поставить галку напротив своего типа рамы.
4. Перейти в INITIAL TUNE PARAMETERS
Здесь ввести размер своего БЛА, количество ячеек в АКБ, тип АКБ, максимальное и минимальное напряжение одной ячейки АКБ.
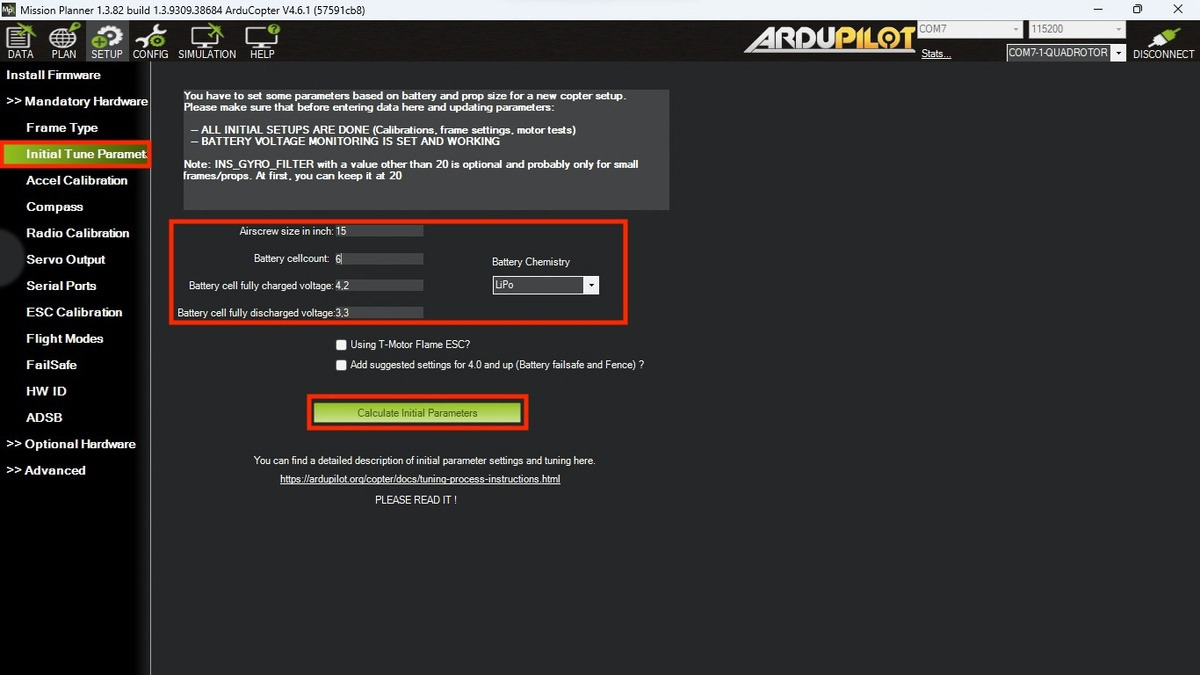
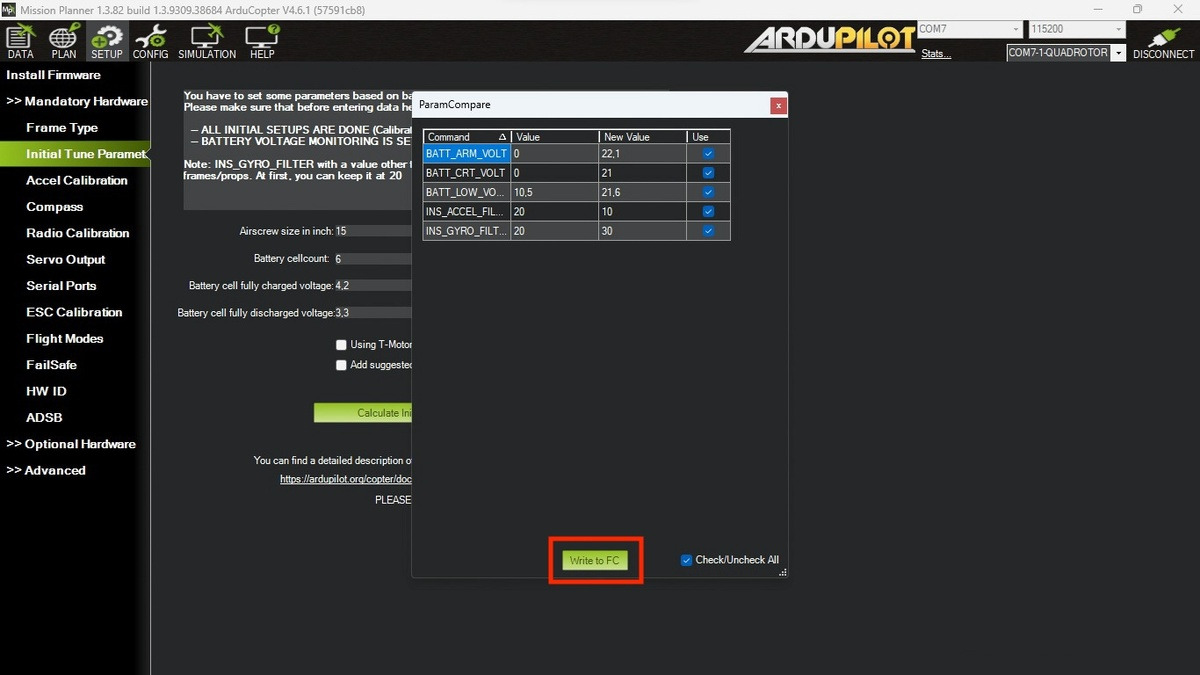
5. Нажать CALCULATE — автоматически определятся параметры, которые требуется сохранить на ПК нажатием WRITE TO FC.
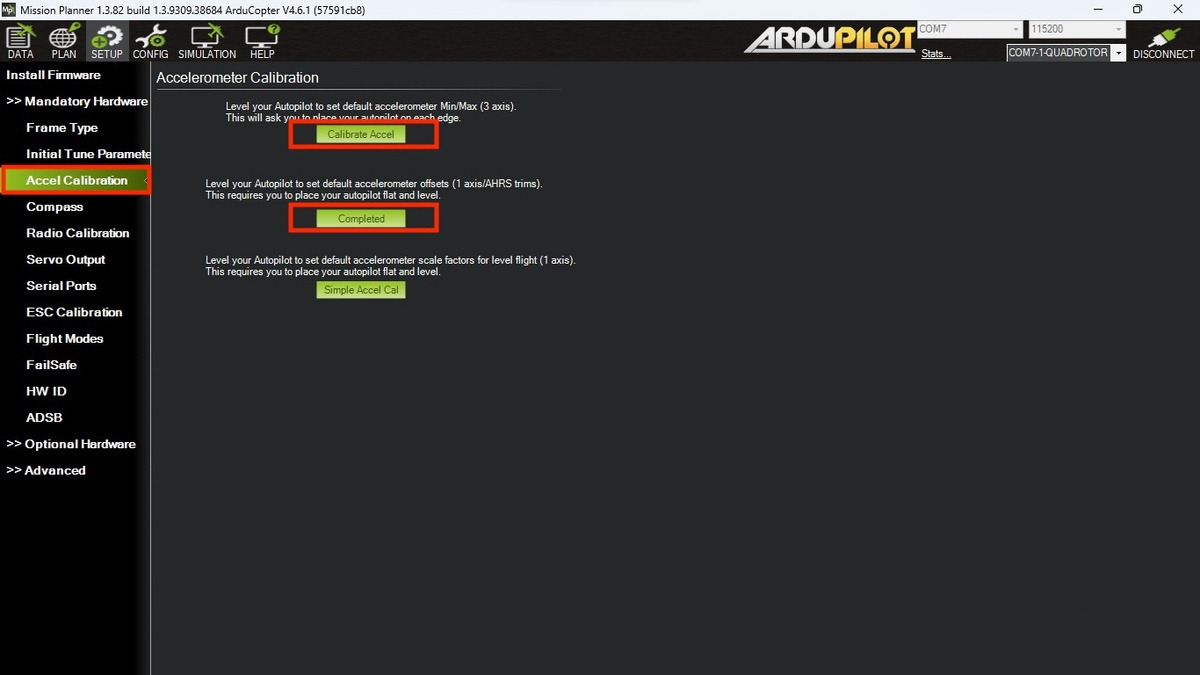
6. Перейти в ACCEL CALIBRATION.
Здесь провести калибровку акселерометра:
— поставить квадрокоптер ровно и подтвердить нажатием кнопки;
— повернуть квадрокоптер на левый бок и подтвердить нажатием кнопки;
— повернуть квадрокоптере на правый бок и подтвердить нажатием кнопки;
— повернуть квадрокоптере носом вниз и подтвердить нажатием кнопки;
— повернуть квадрокоптер носом вверх и подтвердить нажатием кнопки;
— перевернуть квадрокоптер и подтвердить нажатием кнопки.
Калибровка выполнена.
7. Поставить квадрокоптер ровно на поверхность по уровню и выбрать вторую калибровку.
Третью калибровку можно не проводить, она требуется для больших агро-БЛА.
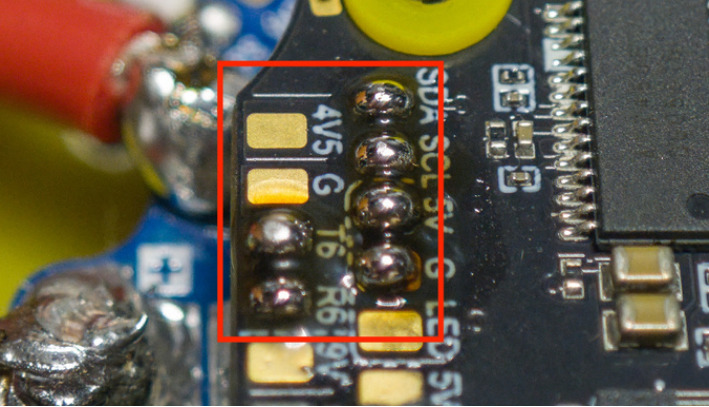
8. Так как используется ПК SpeedyBee F405 v3, который не имеет встроенного компаса, то его необходимо заранее его установить!
Для этого на мануале найти SERIAL6 -> UART6 для GPS и компас с помощью I2C на контактах SDA и SCL, к которым подпаяться.
9. Перейти в раздел COMPASS для калибровки компаса и нажать START.
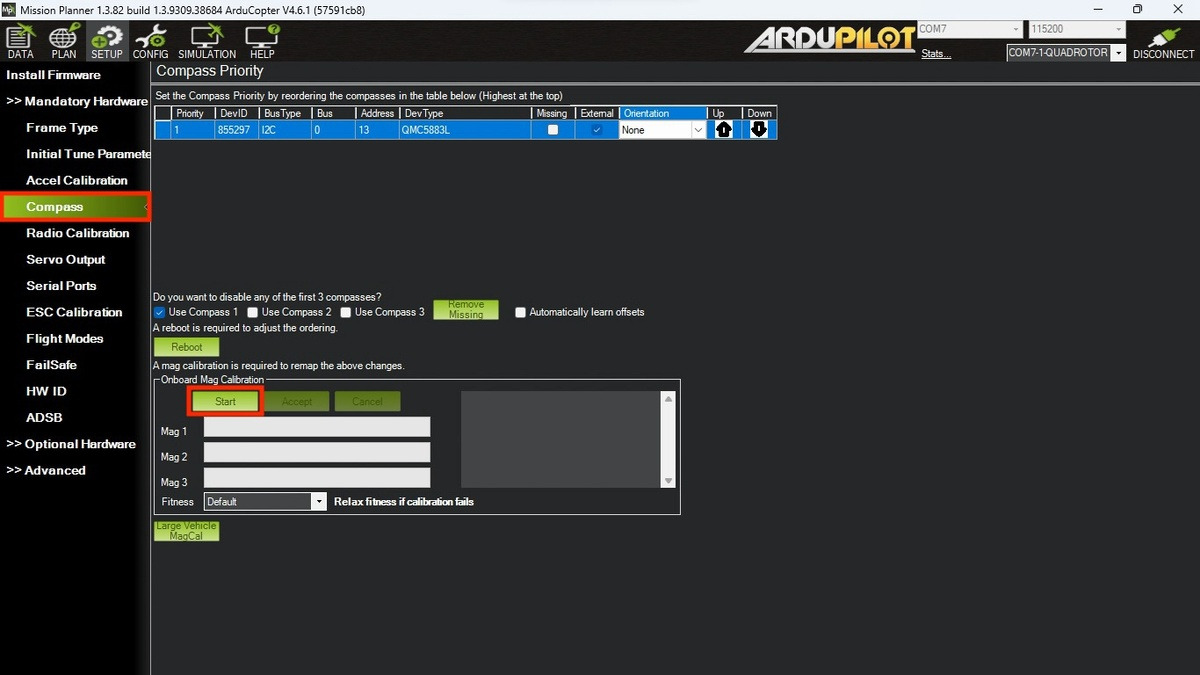
При калибровке необходимо поворачивать квадрокоптер в те же положения, как и при калибровке акселерометра и дополнительно в каждом направлении повернуть квадрокоптер на 360° в одну и другую сторону.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.