
Бесплатный фрагмент - Навигационная имплантология
Практическое руководство для практикующих имплантологов

Благодарности
Я хочу выразить искреннюю признательность всем, кто помогал и поддерживал меня в процессе создания этой книги. Этот труд стал возможным благодаря вкладу множества людей, чья поддержка, знания и усилия вдохновляли меня на каждом этапе работы.
Прежде всего, я хочу поблагодарить своего соавтора, Иванова Петра Владимировича, ставшего инициатором этого проекта, за глубокий профессионализм, неоценимый вклад и преданность нашему проекту. Ваши знания и опыт сделали эту книгу уникальной и действительно полезной.
Особую благодарность я выражаю своей семье, чья поддержка была для меня источником сил и вдохновения. Ваше терпение, понимание и вера в меня позволили мне завершить эту работу.
Хочу поблагодарить своих коллег и друзей, чьи советы и конструктивная критика помогли улучшить содержание книги. Ваше участие стало важной частью процесса, и я ценю вашу готовность делиться опытом и знаниями.
Отдельное спасибо моему научному редактору, Зюлькиной Ларисе Алексеевне, за тщательную работу над текстом. Ваш профессионализм и внимание к деталям придали книге завершённый вид и сделали её понятной и доступной для читателей.
Я также выражаю благодарность своим пациентам, которые доверяли мне и вдохновляли на совершенствование профессиональных навыков. Каждый случай, каждая история — это бесценный вклад в накопление опыта и развитие навыков, которые нашли отражение на страницах этой книги.
И наконец, я хочу поблагодарить всех, кто разделяет мой интерес к дентальной имплантологии и навигационным методам. Ваши вопросы и стремление к знаниям подталкивают меня к постоянному развитию и поиску новых решений.
Введение
Современная имплантология представляет собой одну из самых динамично развивающихся областей стоматологии, где технологические инновации играют ключевую роль в повышении эффективности и предсказуемости лечения. В последние годы значительное внимание уделяется навигационной имплантологии, которая представляет собой передовой подход к планированию и проведению имплантационных операций с использованием цифровых технологий. Настоящая книга, «Навигационная имплантология», является результатом многолетнего опыта и тщательного изучения последних достижений в этой области. Она написана с целью предоставить практическое руководство для специалистов, стремящихся внедрить навигационные методы в свою практику.
Данная книга предназначена для практикующих специалистов-имплантологов, а также студентов и стоматологов, заинтересованных в освоении и применении навигационных методов в своей практике. Она адресована тем, кто стремится улучшить качество своих профессиональных навыков и внедрить в свою практику самые современные технологии. Навигационная имплантология открывает новые возможности для достижения высоких клинических результатов и повышения уровня комфорта для пациентов.
Цель этой книги — обобщить накопленные знания по навигационной имплантологии и поделиться моим многолетним опытом, чтобы помочь коллегам в повышении качества и предсказуемости их работы. На страницах книги представлены результаты многочисленных научных исследований, на основании которых разработаны протоколы и методы, позволяющие существенно повысить точность установки имплантатов и улучшить результаты лечения. Вся информация изложена в доступной и последовательной форме, что делает книгу полезной как для опытных специалистов, так и для начинающих имплантологов.
Книга структурирована таким образом, чтобы читатель мог не только изучить теоретические основы навигационной имплантологии, но и познакомиться с практическими аспектами через детальный анализ клинических случаев, выполненных мной. Такой подход позволяет не только глубже понять принципы и механизмы работы современных навигационных систем, но и увидеть реальные результаты их применения.
Структура книги состоит из 12 глав, каждая из которых посвящена определенному аспекту навигационной имплантологии. В первой главе рассматриваются методы оптимального позиционирования имплантатов, что является ключевым фактором для достижения долгосрочных успешных результатов. Вторая глава посвящена различным навигационным методам, которые используются в имплантологии, включая их преимущества и ограничения. В третьей главе представлена история развития навигационной имплантологии, начиная с первых попыток применения навигационных систем и до современных высокотехнологичных решений.
Цифровая стоматология, обсуждаемая в четвертой главе, играет важную роль в современном подходе к имплантации, предоставляя стоматологам инструменты для точного планирования и выполнения операций. В пятой и шестой главах рассматриваются компьютерная визуализация и проектирование, которые позволяют создавать виртуальные модели и планировать операции с высокой степенью точности. Седьмая глава посвящена компьютерному производству, включающему изготовление навигационных шаблонов и других инструментов с использованием CAD/CAM технологий.
Навигационные шаблоны, обсуждаемые в восьмой главе, играют важную роль в обеспечении точности и безопасности имплантационных операций. В девятой главе представлены различные системы навигационных инструментов, которые используются в современной имплантологии. Десятая глава включает пошаговые протоколы установки имплантатов, что позволяет стоматологам следовать проверенным методикам и избегать возможных ошибок.
В одиннадцатой главе рассматриваются аспекты цифровой реконструктивной хирургии, которые открывают новые возможности для восстановления челюстно-лицевой области. Последняя, двенадцатая глава, посвящена протезированию в навигационной имплантологии, в ней обсуждаются современные методы создания и установки протезов с использованием навигационных технологий.
Мой опыт в имплантологии насчитывает более 20 лет, и я являюсь автором книги «Первая сотня», которая стала руководством для начинающих имплантологов, помогая им успешно установить первые сто имплантатов без ошибок. Многолетний практический опыт и глубокие знания в этой области позволили мне собрать и систематизировать материалы для этой книги, чтобы предложить коллегам наиболее эффективные и проверенные методы работы.
Навигационная имплантология позволяет существенно увеличить точность и прогнозируемость имплантации, ускорить процесс заживления и минимизировать риски осложнений. Использование навигационных шаблонов и цифрового планирования дает возможность стоматологам минимизировать хирургическое вмешательство, что способствует более быстрому заживлению и повышению комфорта для пациентов. Эти методы также позволяют более точно прогнозировать результаты лечения и значительно улучшать результаты комплексной стоматологической реабилитации.
При написании данной книги было изучено большое количество научных исследований, которые служат фундаментом для предлагаемых методов и рекомендаций. Ссылки на эти исследования предоставлены в тексте, что позволяет читателям самостоятельно ознакомиться с первоисточниками и углубить свои знания в данной области. Каждый раздел книги включает примеры из клинической практики, иллюстрации и пошаговые инструкции, что делает материал легко усваиваемым и применимым на практике.
Надеюсь, что эта книга станет надежным помощником для специалистов, стремящихся внедрить навигационные методы в свою практику и улучшить качество оказываемой помощи. Ваш путь к совершенству в имплантологии начинается здесь, с освоения передовых технологий и подходов, которые открывают новые горизонты в стоматологии. В мире, где технологии постоянно развиваются, важно не только идти в ногу со временем, но и быть на шаг впереди, внедряя инновационные методы в свою практику для достижения наилучших результатов.
Добро пожаловать в мир навигационной имплантологии! Желаю вам успехов в освоении новых технологий и улучшении качества вашей профессиональной деятельности. Пусть каждый ваш шаг будет точным, каждое решение — обоснованным, а каждый результат — предсказуемым и успешным.
Глава 1. Позиционирование имплантатов
В настоящее время протезирование с опорой на имплантаты стало эффективной методикой реабилитации пациентов с адентией. Отсутствие необходимости в препарировании соседних зубов, эстетичный внешний вид протезов и благоприятный отдаленный прогноз лечения сделали имплантацию популярным подходом среди врачей и пациентов.
Но, как показывают исследования, долгосрочное функционирование ортопедической конструкции с опорой на имплантаты достигается только при условии установки имплантата в оптимальное положение. Неоптимальное положение имплантата, в свою очередь, может негативно сказаться на итоговом результате лечения. Следовательно, правильное позиционирование имплантата — залог изготовления долговечного протеза.
Критериями успешного функционирования имплантата являются:
• Отсутствие жалоб и болезненности как в покое, так и при функции
• Абсолютная неподвижность
• Не более 2мм потери кости в результате ремоделирования и отсутствие потери кости в дальнейшем
• Отсутствие воспаления десны, кровоточивости и экссудации
При соответствии всем критериям можно дать хороший прогноз данному имплантату и надеяться на его длительное функционирование.
Правила позиционирования имплантата
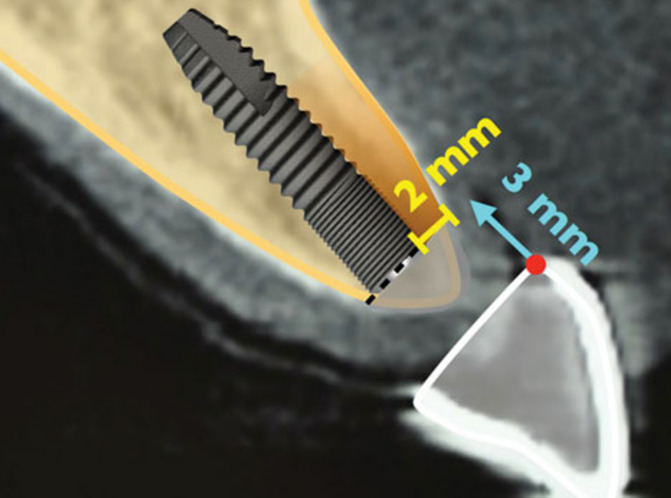
Как показали исследования, самым важным аспектом, влияющим на долгосрочную успешность, является положение имплантата. Основным правилом является 3A-2B Rule (правило 3А-2В), предложенное Fernando Rojas-Vizcaya в 2013 году. Оно гласит: «Правильное позиционирование имплантата подразумевает наличие 2мм кости буккально (2В) и 3мм мягких тканей апикальнее реставрации, то есть над платформой имплантата (3А). Доказано, что именно такое расположение имплантата гарантирует правильное формирование биологической ширины, а, следовательно, минимальное ремоделирование тканей, максимальную устойчивость к микробной инвазии и длительное функционирование.
Постараемся подробнее вникнуть в это правило, и так 2В — костные структуры, имеющие толщину менее 2 мм, будут лизированы из-за недостаточного кровоснабжения, так как 1 мм внешнего слоя кости представлено кортикальной костью, а 1мм губчатой кости, обращенной к имплантату, недостаточно для питания и предотвращения резорбции. Хотя естественные зубы имеют вестибулярную кость значительно менее 2 мм, (особенно фронтальная группа зубов) это возможно благодаря дополнительному кровоснабжению, получаемому из пародонтальной связки, которая отсутствует у имплантата. Поэтому имплантат должен быть размещен таким образом, чтобы его окружала кость толщиной не менее 2мм.
Мягкие ткани, расположенные над платформой имплантата — основа не только эстетического вида будущей реставрации, но и основная защита имплантата от бактериальной инвазии. При наличии менее 3 мм мягких тканей, что часто встречается при тонком биотипе десны, протетической проблемой является создание внутридесневой части абатмента, которая должна обеспечить переход с диаметра имплантата к диаметру контура прорезывания, что при недостатке высоты ведет к неоптимальному грибовидному абатменту.
Биологической проблемой при толщине слизистой менее 3 мм является невозможность сформировать биологическую ширину, что ведет к получению дополнительного места под биологическую ширину с помощью ремоделирования краевой кости, а именно ее резорбции и заполнения освободившегося пространства мягкими тканями. Поэтому важно в случаях, когда имеется недостаточная толщина слизистой оболочки, заранее спланировать либо хирургические манипуляции, направленные на увеличение толщины, либо удалить часть кости, увеличив расстояние для мягких тканей, либо выполнять установку имплантата субантрально (глубже костного края), чтобы в результате ремоделирования имплантат все равно не потерял буккальную кость.
Рассмотрим другие правила позиционирования имплантатов, которые будут необходимы для создания правильного плана лечения и определения оптимальных позиций для имплантатов.
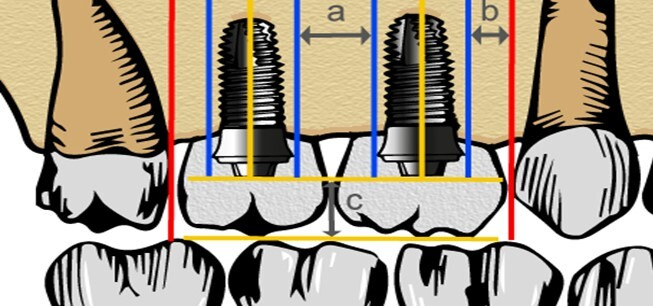
• Минимальное расстояние между имплантатом и соседним естественным зубом должно составлять от 2 мм
• Минимальное расстояние между двумя имплантатами должно составлять от 4 мм
• Зона безопасности от нижнего альвеолярного нерва или дна верхнечелюстной пазухи до верхушки имплантата должна составлять 2 мм
• От платформы имплантата до окклюзионной поверхности зуба антагониста должно быть доступно не менее 7 мм межокклюзионного пространства для цементной фиксации и не менее 5 мм межокклюзионного пространства для прямой винтовой фиксации.
Установка имплантата, согласно этим правилам, обеспечит его успешную остеоинтеграцию и долгосрочную стабильность, предотвращая резорбцию костной ткани и поддерживая нормальное функционирование имплантата. Это способствует равномерному распределению жевательной нагрузки и минимизирует риск воспалительных процессов, обеспечивая сохранение мягких тканей и предотвращение инфекций. Таким образом, корректное позиционирование имплантата критически важно для его функциональности, эстетических результатов и общего успеха протезирования.
И все же, запросом пациента является создание функционального протеза, а не установка имплантата, следовательно, размещение имплантатов всецело подчинено ортопедическим задачам, поэтому очень важно знать и понимать, какой именно реставрацией выполняется протезирование и какие правила позиционирования имплантатов применяются для этого типа реставраций.
Типы ортопедических конструкций
Количество и положение имплантатов будет определяться типом протеза, которым будет выполнено протезирование конкретного пациента. Carl E. Misch разделил ортопедические реставрации на две группы: несъемные реставрации FP (Fixed Prosthesis) и съемные реставрации RP (Removable Prosthetics), в этих группах выделил пять типов, как описано в следующей таблице:
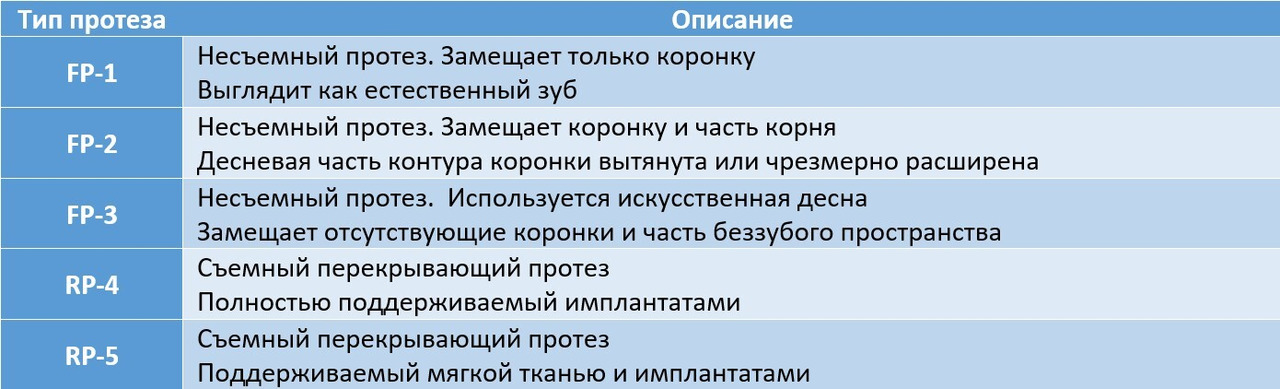
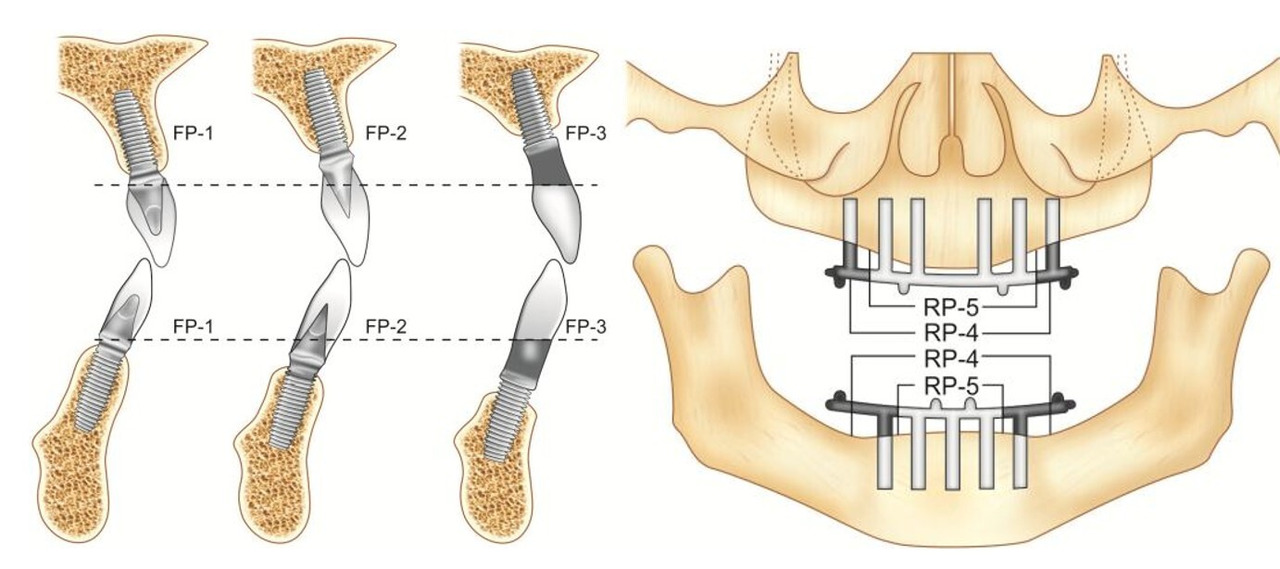
FP-1
Несъёмная реставрация FР-1 по всем параметрам полностью соответствует естественным зубам и является наиболее выгодной заменой зуба как с функциональной точки зрения (передача жевательных усилий проходит аналогично естественному зубу), так и с эстетической (эстетика реставрации близка к естественной). Реставрация FP-1 — это идеальная реставрация, полностью соответствующая коронке на естественном зубе без повреждений пародонта, что особенно важно во фронтальном отделе верхней челюсти, где эстетика является главной заботой врача ортопеда.
Между тем, для выполнения реставрации FP-1 важно не только правильно разместить имплантат (аналогично корню замещаемого зуба), но и клиническая ситуация должна предрасполагать к созданию идеальной реставрации, а именно костное предложение и количество мягкой ткани должны соответствовать идеальной ситуации. В противном случае, необходимо либо отказаться от выполнения реставрации типа FP-1 в пользу FP-2 или FP-3, либо провести костнопластические и мягкотканые реконструктивные вмешательства для восстановления идеальной конфигурации кости и мягких тканей.
Важно, что этот выбор должен быть выполнен информированным пациентом до проведения операции по установке имплантата, а не после. Необходимо понимать, что, ожидая получить ортопедические реставрации, пациент представляет именно реставрации типа FP-1, поэтому при протезировании реставрациями других классов врач должен уделить достаточно внимания разъяснению отличий и способствовать осознанному принятию пациентом будущей реставрации.
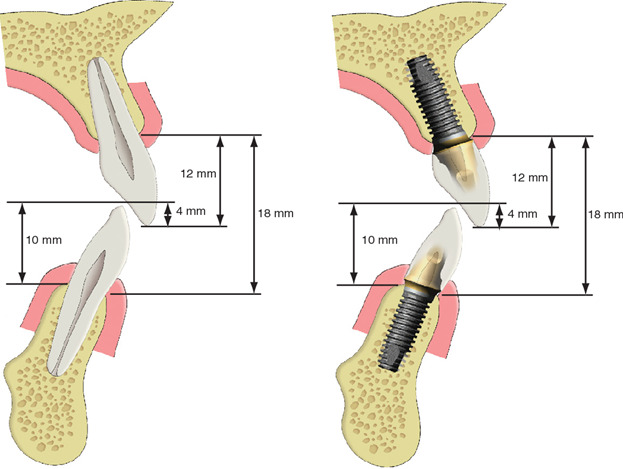
FP-2
Несъёмная реставрация FР-2 заменяет коронку, а также некоторую часть корня естественного зуба, чем очень похожа на искусственную коронку, покрывающую естественный зуб, имеющий заболевания пародонта, сопровождающиеся рецессией мягких тканей. Обычно места утраты зубов имеют умеренную потерю костной ткани, а также потерю мягких тканей из-за ремоделирования альвеолярного отростка при заживлении постэкстракционной лунки. В этих случаях восстановление отсутствующих зубов возможно с помощью реставрации FP-2 типа, так как верхняя часть коронки находится в правильном положении, а апикальная часть увеличена.
Реставрация FP-2 не требует столь идеального положения имплантата в мезиодистальном направлении, поэтому положение имплантата можно выбрать, руководствуясь в большей степени шириной кости или ангуляцией, чем сугубо эстетическими требованиями.
Использование реставраций FP-2 типа во фронтальном отделе верхней челюсти целесообразно при невысокой линии улыбки, когда апикальная треть коронки не визуализируется во время улыбки или разговора. Пациент должен быть четко проинформирован об этом перед тем, как идти на установку имплантата.

FP-3
FP-3 — это несъемная реставрация, замещающая как коронки естественных зубов, так и прилегающие мягкие ткани (краевую десну и межзубные сосочки), для чего используются розовые материалы. Как и в случае с протезом FP-2, доступная кость располагается апикальнее идеального положения, и/или имплантаты установлены в область межзубных сосочков, однако ввиду визуализации апикальной части коронок при высокой улыбке, либо из-за эстетических пожеланий пациента «длинные зубы» протеза FP-2 неприемлемы, и мы вынуждены применить имитацию мягких тканей.
В результате зубы имеют естественный вид по размеру и форме, а розовые материалы имитируют область межзубных сосочков и пришеечную область десны альвеолярного отростка. То есть применение реставрации FP-3 позволяет получить хорошие результаты при неидеальных параметрах кости и мягких тканей, а также при неоптимальном расположении имплантата, что может с успехом использоваться для ортопедической компенсации неоптимального хирургического результата.
В случаях выраженного недостатка кости и принятия решения устанавливать имплантаты в места с максимальным костным предложением, а не в места оптимального для ортопедической конструкции положения реставрация FP-3 даст возможность выполнить эстетически приемлемое протезирование.
Сложностью в изготовлении протезов FP-3 является подбор цвета искусственной десны. Так как естественная десна меняет цвет в зависимости от кровоснабжения, обычно несколько раз в течении дня, это довольно трудно передать с помощью современных материалов, потому нужно проектировать достаточный объем искусственной десны, избегая применения розовых материалов небольшими фрагментами. При изготовлении тотальных мостов с опорой на имплантаты и наличии у пациента десневой улыбки целесообразно задуматься о резекции части альвеолярного отростка, что позволит скрыть от визуализации границу протеза.

RP-4
RP-4 — это съемный протез, полностью поддерживаемый имплантатами, зубами или и теми, и другими. После установки протез жестко фиксируется и обладает стабильностью несъемной реставрации. Съемный протез соединяется с имплантатами при помощи различных аттачментов, балочного крепления или телескопических коронок.
Для изготовления протеза RP-4 требуется 4–6 имплантатов на нижней челюсти и 5–8 имплантатов — на верхней челюсти. Для создания места для съемного протеза и супраструктур необходимо позиционировать имплантаты иначе, чем для несъемного протеза. Необходима установка в более апикальном и лингвальном положении по сравнению с расположением имплантатов несъемного протеза.

Протез RP-4 может выглядеть как FP-1, FP-2 или FP-3. Цельноциркониевый съемный протез с телескопической фиксацией обладает эстетикой, не уступающей циркониевым несъемным конструкциям, однако возможность самостоятельно демонтировать протез обеспечивает ряд преимуществ и всего один отрицательный аспект — психологический дискомфорт (вызванный необходимостью снимать протез), что необходимо всегда обсуждать с пациентом.
RP-5
RP-5 — это съемный протез, сочетающий поддержку имплантатами и слизистой оболочкой полости рта. Количество имплантатов может варьировать от 2 до 4 на нижней челюсти и от 2 до 6 на верхней. Крепление съемного протеза может осуществляться аттачментами к одиночным имплантатам, либо протез может крепиться к балке, объединяющей имплантаты. Однако, в отличие от RP-4, имплантаты не обеспечивают полную поддержку съемного протеза на всем протяжении, а локализованы в одном месте, обычно во фронтальном отделе. В этом случае протез поддерживается имплантатами, а не полностью опирается на них (в отличие от RP-4), такая конструкция очень похожа на частичный съемный протез, поддерживаемый естественными зубами.
Как и в случае с традиционным протезом, те участки слизистой оболочки, которые получают нагрузку от съемного протеза, подвергаются резорбции кости, которая в случае с RP-5 будет в 2–3 раза быстрее, чем в случае с естественными зубами. Пациенты, использующие протезы RP-5, должны каждый год проходить перебазировку протеза с помощью мягкой или твердой пластмассы, а также коррекцию окклюзии. Учитывая фактор ускоренной резорбции кости, протезы RP-5 следует с осторожностью использовать, особенно при молодом возрасте пациента.
Основное преимущество протезов RP-5 — это низкая стоимость, в то же время они обеспечивают лучшее качество жизни, нежели полные съемные протезы. Добавив дополнительные имплантаты, RP-5 всегда можно перевести в RP-4, однако это потребует повторного выполнения всей ортопедической работы. Еще одним частым применением протезов RP-5 является улучшение качества жизни пациентов, использующих полные съемные протезы. При недостаточной ретенции полного съемного протеза и, соответственно, подвижности протеза во время жевания или разговора можно использовать улучшение ретенции путем добавления имплантированных опор. То есть пациенту, уже имеющему съемный протез, устанавливают, допустим, два имплантата и фиксируем к ним аттачменты — абатменты, после чего в полости рта монтируют втулки, одновременно выполняя клиническую перебазировку протеза. Эта методика позволяет значительно улучшить качество жизни пациента, пользующегося съемным протезом.
Определение количества имплантатов
В случае отсутствия одного зуба или нескольких зубов можно легко определить количество и положение имплантатов. Как правило, для всех ситуаций с частичной адентией, кроме потери одного зуба, минимальное количество используемых имплантатов — два. Максимальное количество используемых имплантатов зависит от количества отсутствующих зубов и обычно один имплантат заменяет один зуб.
При протезировании полностью беззубой верхней или нижней челюсти с помощью полнодугового протеза с опорой на имплантаты обычными трудностями является недостаток альвеолярной кости, утраченной в результате атрофии альвеолярного отростка. На верхней челюсти это фронтальный участок, потерявший как высоту, так и ширину, а на нижней челюсти это боковые участки, в области которых близость нижнеальвеолярного нерва создает значительные трудности для установки имплантатов.
Carl E. Misch выделил в полнодуговых реставрациях на имплантатах две части: опорная часть, характеризующаяся переднезадней дистанцией (расстоянием от самого фронтального до самого дистального имплантата), и консольная часть (не имеющая прямой поддержки имплантатами), для верхней челюсти это фронтальная часть, а для нижней это дистальные участки. Он разделил формы дуги альвеолярного гребня на три типа: дуга квадратной формы, дуга овальной формы и дуга конической формы. И предложил для каждого типа дуги оптимальный вариант расстановки имплантатов.
При квадратной форме дуги центральные и боковые резцы расположены плоско и не создают значительную консоль по отношению к клыкам. Соответственно, имплантаты, установленные в области клыков, могут прекрасно распределять окклюзионную нагрузку во фронтальном отделе. Таким образом, при квадратной форме дуги верхней челюсти использование имплантатов, замещающих резцы, не обязательно, и самыми фронтальными имплантами являются имплантаты в области клыков.
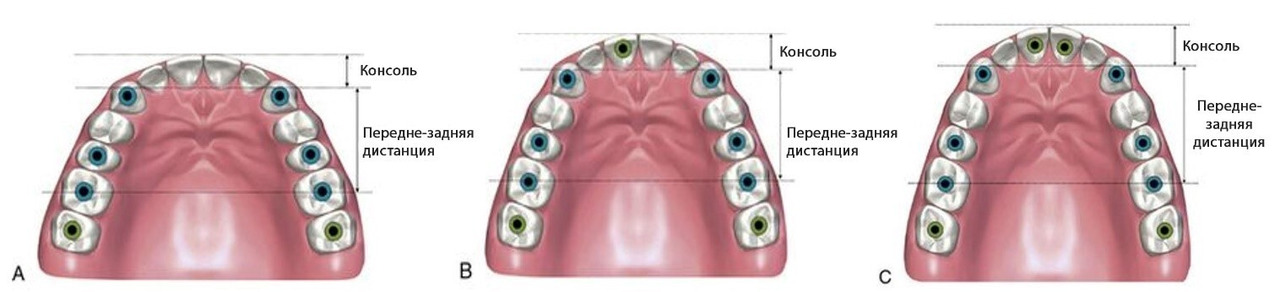
В случае овальной формы дуги, длина фронтальной консоли по отношению к клыкам значительно больше, а, соответственно, больше сил распределяется во фронтальном отделе верхней челюсти. Рекомендовано использовать три имплантата во фронтальном участке два в положении клыков и один в положении центрального или бокового резца.
Конический тип дуги самый сложный для протезирования из-за максимальной длины фронтальной консоли, фронтальный участок испытывает высокую окклюзионную нагрузку. В этом случае показано использовать как минимум четыре имплантата во фронтальном участке — два в положении клыков и два в положении центральных или боковых резцов.
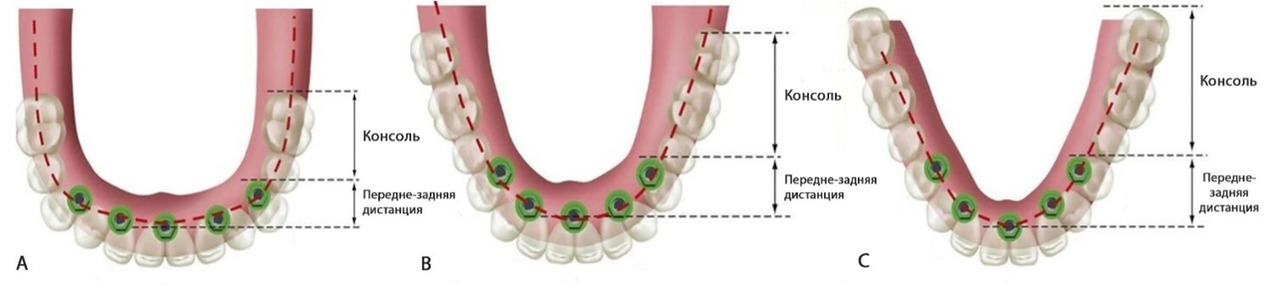
Также как и верхняя челюсть, нижняя челюсть имеет три типа дуги альвеолярного гребня, соответствующие верхним: дуга квадратной формы, дуга овальной формы и дуга конической формы. Между тем, на нижней челюсти опорная часть располагается во фронтальном отделе, а консольная часть — это дистальные участки реставрации, длину которых и предложено определять в зависимости от формы дуги, а именно от переднезадней дистанции (расстоянием от самого фронтального до самого дистального имплантата).
Основное правило гласит: длина дистальной консоли при реставрациях на нескольких имплантатах не должна превышать переднезаднюю дистанцию в 2,5 раза, таким образом, при переднезадней дистанции 10мм консоль, которую мы можем использовать, должна быть не более 25 мм.
Для квадратного типа дуги AP (переднезадняя дистанция) составляет от 2 мм до 5 мм, соответственно, консоль в дистальном отделе должна быть представлена одним премоляром или моляром. Использование более длинной дистальной, консоли вызовет неоптимальное распределение окклюзионной нагрузки и может привести к структурным повреждениям имплантата.
Для овального типа дуги AP (переднезадняя дистанция) составляет от 6 мм до 8 мм, соответственно, консоль в дистальном отделе должна быть представлена одним моляром или премоляром и моляром.
При коническом типе дуги AP (переднезадняя дистанция) составляет более 8 мм, соответственно, консоль в дистальном отделе должна быть представлена одним или двумя молярами.
Составление плана лечения
Необходимо принять решение о плане лечения в соответствии с клинической картиной пациента, чтобы создать протез, который прослужит долго и будет соответствовать желаниям пациента. Пациент может быть частично или полностью беззубым. В обоих случаях необходимо соблюдать основные принципы имплантационной терапии. Ниже приведено описание различных факторов, которые необходимо учитывать при составлении плана лечения.
Количество и расположение отсутствующих зубов
Количество и расположение отсутствующего зуба/зубов играют важную роль при определении плана лечения. Принято считать, что имплантационная терапия в эстетической зоне — сложная задача. При размещении имплантата в эстетической зоне необходимо учитывать множество факторов, включая объем доступной кости, профиль мягких тканей, угол наклона имплантата для достижения наилучших эстетических результатов и букколингвальное размещение имплантата.
Размещение имплантатов в задних участках верхней и нижней челюстей может представлять собой вызов при недостатке костной массы. В этих случаях необходимо провести процедуру увеличения объема костной ткани для обеспечения надежной опоры для имплантата. Поскольку кость верхней челюсти более пористая по сравнению с более плотной костью нижней челюсти, достигнуть начальной стабильности имплантата сложнее, особенно когда количество доступной кости ограничено, для чего может потребоваться процедура синуслифтинга, целью которой является увеличение костного объема для адекватной поддержки имплантатов.
Объединение естественной и имплантированной опоры
Ранее бытовало мнение, что сочетание зуба и имплантата как опор для одного мостовидного протеза приводит к усиленным изгибающим нагрузкам на имплантат из-за их разной степени подвижности. Это теоретически способствовало увеличению риска снижения длительности эффективного функционирования протеза по сравнению с протезами, полностью опирающимися на имплантаты. Для пациентов, страдающих от окклюзионных парафункций (бруксизма), такие окклюзионные нагрузки могли бы оказываться разрушительными для имплантата. Тем не менее, использование зуба вместе с имплантатом в качестве опоры для протеза имеет ряд преимуществ, включая:
• Расширение клинических возможностей: объединение зубов с имплантатами увеличивает варианты возможных конструкций, особенно при наличии анатомических препятствий для установки дополнительных имплантатов, таких как ограниченное пространство в области верхнечелюстной пазухи или подбородочного отверстия, недостаток костной ткани или отказ пациента от процедуры наращивания кости
• Улучшенное восприятие: использование зубов вместе с имплантатами сохраняет проприоцептивные ощущения, приближая восприятие протеза к естественным зубам
• Увеличение стабильности: введение в конструкцию имплантатов обеспечивает дополнительную стабильность всему зубному ряду
• Сокращение затрат: позволяет сократить количество необходимых для протезирования имплантатов и абатментов, тем самым уменьшая общие затраты.
• Отказ от консолей: применение зуба как опоры зачастую позволяет отказаться от использования консолей в мостовидных протезах
Большинство авторов предлагало для защиты конструкций, объединяющих естественные зубы и имплантаты, от биомеханических проблем использование нежесткого соединителя в структуре протеза или телескопических коронок для уменьшения изгибающих нагрузок на имплантат. Но клинические наблюдения не подтвердили снижение рисков при использовании данного подхода. Основной проблемой протезов со смешанной опорой в клинике явилось увеличение процента кариеса опорных зубов на 3% — 5,2%, согласно различным исследованиям, а вовсе не биомеханические проблемы.
Современная точка зрения заключается в том, что вполне возможно использовать естественные зубы в качестве дополнительной опоры для мостовидных протезов на имплантатах, если учитывать следующие факторы:
• Использовать для опоры протеза зубы с полностью здоровым пародонтом и отсутствием костной деструкции вокруг зуба
• Отдавать предпочтение жестким каркасным материалам, таким как металлы и диоксид циркония
• Обеспечить параллельность между имплантатом и зубом для равномерного распределения окклюзионных нагрузок
• Применять исключительно постоянную цементную фиксацию и полностью отказаться от использования временных и нетвердеющих цементов
• Планировать мосты с короткими пролетами, где это возможно
• Избегать протезирования данным методом пациентов с окклюзионными парафункциями, включая бруксизм
• Отсеивать пациентов с высоким риском кариеса как неподходящих кандидатов для данного метода протезирования
• Стремиться к окклюзионной гармонии и эффективному распределению жевательной нагрузки через окклюзионную коррекцию
• Не использовать в качестве опор эндодонтически пролеченные зубы, зубы со значительным разрушением коронковой части, а также зубы, требующие лечения
Снижение высоты окклюзии
При потере жевательных зубов утрачиваются дистальные опоры зубочелюстной системы, что может привести к изменению и значительному снижению прикуса. В этих ситуациях измеряется вертикальный межальвеолярный размер в положении покоя и изготавливается временный протез для создания нового прикуса и гармонизации новой высоты окклюзии и височно-нижнечелюстного сустава. Эта ситуация может осложняется зубоальвеолярным удлинением (феномен Попова-Годона) зубов челюсти антагониста, что еще больше сокращает межальвеолярное расстояние. Если после поднятия прикуса не удаётся получить желаемого вертикального расстояния, обеспечивающего оптимальный дизайн протеза, необходимо провести эндодонтическое лечение выдвинувшегося зуба, выполнить редукцию коронковой части и накрыть его искусственной коронкой, созданной с учетом оптимального расстояния.
Планирование положения имплантатов еще сильнее осложняется наличием таких состояний, как комбинированный синдром. Комбинированный синдром (Combination Syndrome) — это комплекс специфических изменений в полости рта, которые могут развиться у пациентов с полной потерей зубов на верхней челюсти, восстановленной полным съемным протезом, в то время как на нижней челюсти сохраняются естественные фронтальные зубы. Это характеризуется потерей вестибулярной кости во фронтальной части верхнечелюстного альвеолярного гребня, разрастанием бугров верхней челюсти, гиперплазией слизистой оболочки твердого неба, экструзией нижних фронтальных зубов и разрушением их пародонта.
Комбинированный синдром требует комплексного подхода к лечению, включающего как восстановление функции зубов, так и коррекцию эстетических нарушений, возможно, с использованием комбинации несъемных и съемных протезов, а также методов реконструктивной хирургии для восстановления анатомии челюстно-лицевой области.
Планирование имплантации в эстетической зоне
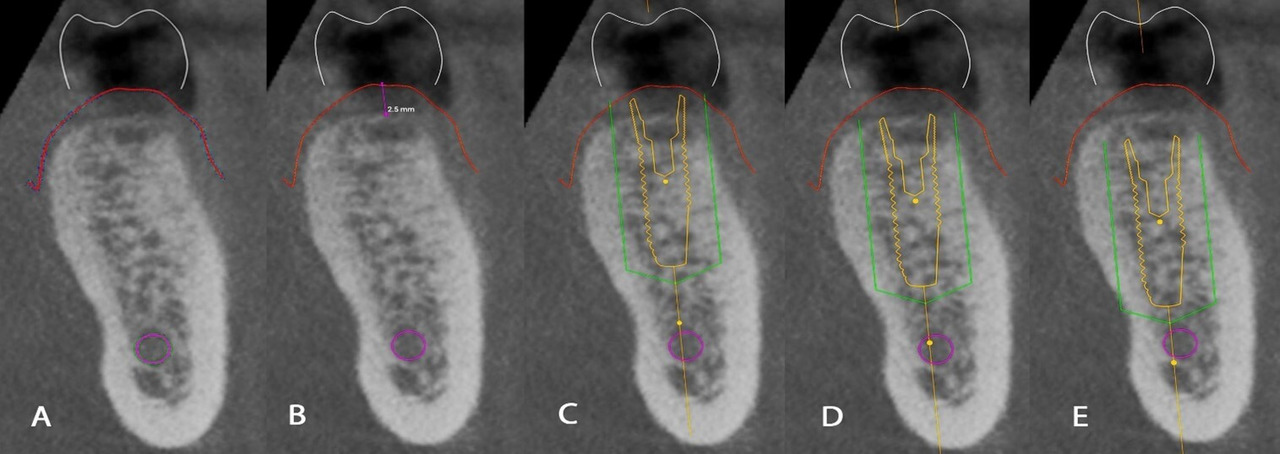
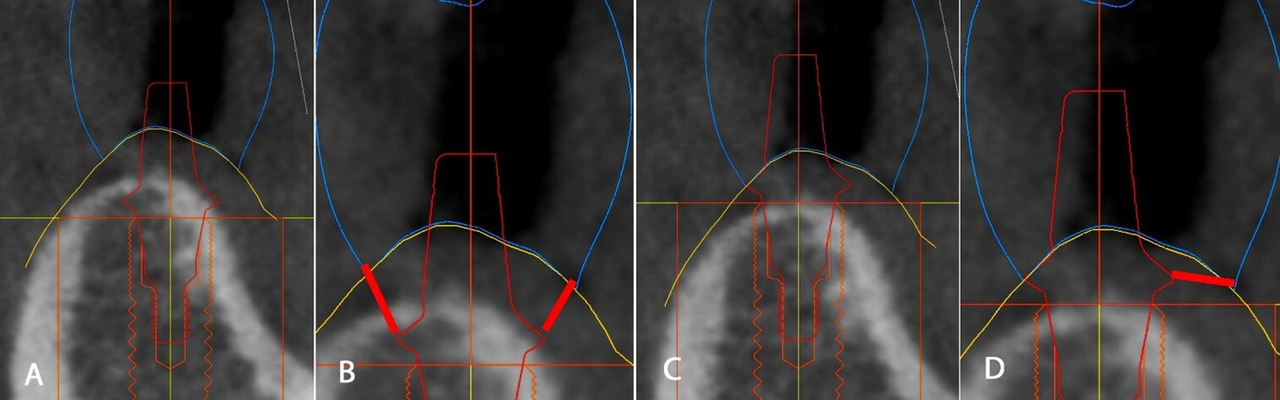
Установка имплантата в эстетически значимой области, то есть в области верхних или нижних фронтальных зубов, является достаточно сложной задачей как для хирурга, так и для ортопеда. Для получения оптимального результата необходимо продумать и спланировать положение будущего имплантата с учетом двух факторов: первый — установка имплантата в альвеолярной кости должна быть выполнена более палатинально\лингвально, в позиции так называемого эстетического окна, что позволит оставить вестибулярно большее количество мягких тканей; второй — обеспечение 3мм или большей толщины мягких тканей, особенно важно во фронтальном отделе, так как это отражается на эстетике реставрации и на сроке ее функционирования.
Планирование позиции имплантата
Используя совмещенные данные (КЛКТ, объединенное с поверхностным объемным сканированием), необходимо спланировать расположение имплантата не только с учетом кости, но и с учетом мягких тканей, расположив платформу имплантата таким образом, чтобы ее покрывало не менее 3 мм мягких тканей. Если имеющегося объема мягких тканей недостаточно, можно использовать процедуры менеджмента мягких тканей или выполнить аугментацию мягких тканей либо выполнить резекцию кости для обеспечения места для соединительной ткани и биологической ширины, либо установить имплантат субкрестально (глубже уровня кости).
Вестибуло-оральный размер альвеолярного костного гребня в области установки имплантата должен составлять не менее 6 мм, чтобы обеспечить 2 мм вестибулярной кости вестибулярнее имплантата (при диаметре имплантата 3,5 мм) и 0,5 мм орально. Мезио-дистальный размер должен составлять не менее 6,5 мм, чтобы обеспечить 1,5 мм расстояния от соседних зубов. Проведение всех измерений проводится на виртуальной модели и обеспечивает достаточную клиническую точность.
Если зуб утрачен давно, или в результате пародонтита утрачена кость и мягкие ткани, необходимо для достижения оптимальных эстетических результатов запланировать процедуры увеличения твердых тканей и мягких тканей.
Не менее важным аспектом является планирование контура прорезывания. Контур прорезывания — это дизайн той части винтовой реставрации или абатмента, который находится в мягких тканях над платформой имплантата, постепенно выходя из десны. Он играет ключевую роль в эстетике и функциональности протеза, влияя на распределение нагрузки, здоровье окружающих мягких тканей и внешний вид реставрации. Самым важным фактором, влияющим на контур прорезывания, является трехмерное размещение имплантата. Если имплантат установлен слишком коронально, не будет достаточного расстояния между платформой имплантата и контуром прорезывания ортопедической конструкции, чтобы анатомически правильно создать появление коронки из десны.
Выбор размеров имплантата
Тонкие имплантаты (имеющие платформу — 3,0—3,5 мм) являются хорошим решением для использования вместо резцов нижней челюсти, а также боковых резцов верхней челюсти, что обеспечит большее количество кости вокруг имплантата. Однако для замещения остальных зубов лучше использовать имплантаты стандартного диаметра (3,75—4,3 мм), так как они обеспечивают большую структурную прочность.
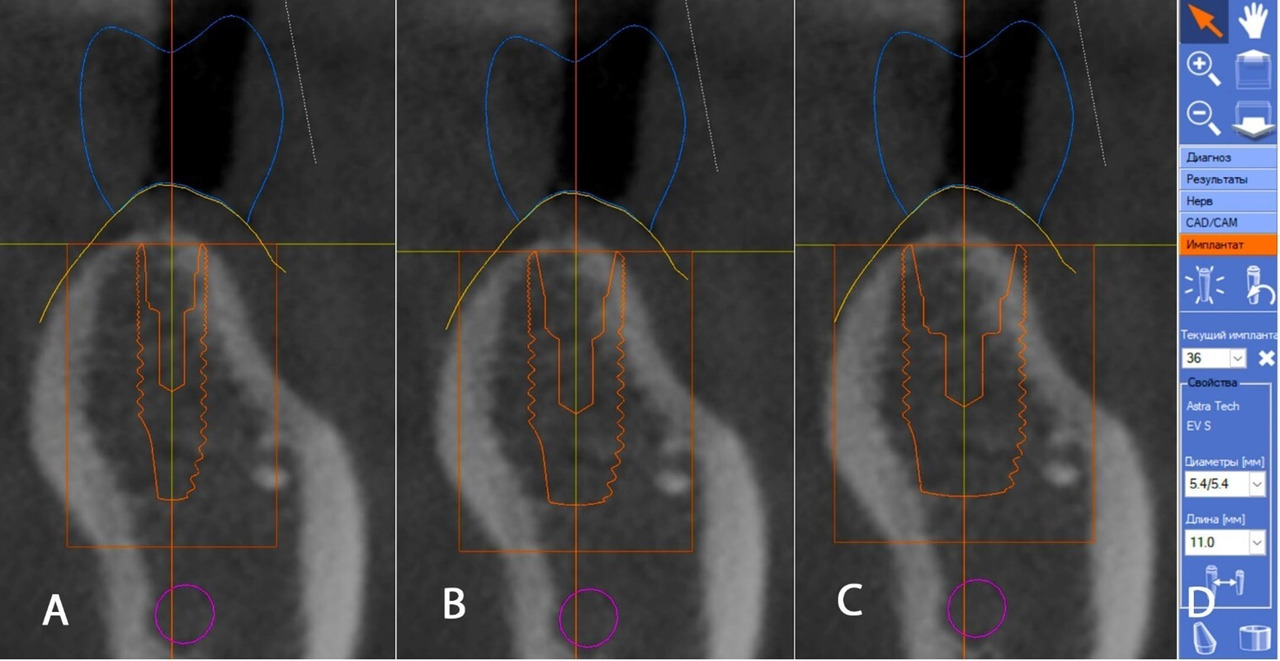
Использование имплантатов большого диаметра (5,0—6,0мм) позволяет оптимизировать контур прорезывания, так как мы имеем меньший перепад между диаметром имплантата и диаметром пришеечной части коронки, также значительно повышается структурная прочность конструкции. Однако для установки имплантов большого диаметра необходимо соответствующее костное предложение.
Порядок планирования
Для составления полного плана лечения рекомендуется использовать следующую последовательность планирования:
• Вид протезирования. Необходимо определиться с объемом протезирования (единичные восстановления или тотальная реабилитация), определить тип ортопедической реставрации (FP1-FP5) и принять решения относительно окклюзии (создание новой окклюзии или протезирование в привычном прикусе).
• Желаемые места расположения имплантатов — возможные места расположения имплантатов. Выбрать желаемые места расположения имплантатов и проверить состояние костной и мягкой ткани в этих областях, в случае необходимости пересмотреть места установки до получения удовлетворительного результата — возможных мест установки имплантатов.
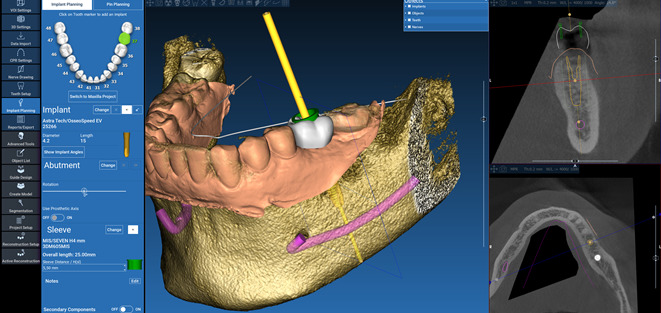
• Размещение имплантатов. В планировщике дентальной имплантации (программное обеспечение для планирования имплантации) загрузить модели используемых имплантатов и расположить их в выбранных местах.
• Ориентация по будущей реставрации. Создать или загрузить прототип будущей реставрации и провести ориентацию имплантатов относительно будущей реставрации (ось имплантата проходит через центр жевательной поверхности реставрации).
• Выбор диаметра. Прежде всего необходимо помнить о том, что имплантат должно окружать достаточное количество кости, так же уменьшение диаметра имплантата снижает структурную прочность конструкции, а увеличение увеличивает, и, чем меньше различие в диаметре имплантата и диаметре цервикальной части коронки, тем меньше расстояния требуется для создания удовлетворительного контура прорезывания.
• Выбор глубины установки. Необходимо расположить платформу имплантата в такое положение, которое обеспечит достаточный объем мягких тканей и приемлемый контур прорезывания.
• Выбор длины имплантата. Правило «самый длинный из возможных» не утратило свою актуальность, однако необходимо соблюдать зоны безопасности около важных анатомических образований и помнить, что не все навигационные наборы позволяют устанавливать имплантаты длиной 16 мм и больше.
В процессе планирования имплантации ключевое значение имеет тщательное и всестороннее рассмотрение всех аспектов предстоящей процедуры. Это не только обеспечивает оптимальный выбор позиций для имплантатов, но и позволяет предвидеть возможные сложности, тем самым максимально снижая риск осложнений. Важность правильного планирования не может быть переоценена, поскольку оно лежит в основе успешного восстановления функциональности и эстетики зубного ряда, а также долгосрочного комфорта и удовлетворенности пациента. Применение современных технологий, таких как виртуальное моделирование, значительно упрощает этот процесс, позволяя врачу и пациенту заранее увидеть ожидаемые результаты и соответствующим образом адаптировать план лечения.
Однако создание идеального плана на виртуальной модели — это лишь первый шаг. Следующий, не менее важный этап — аккуратное и точное перенесение этого плана в реальность. Это требует не только высокой квалификации и опыта со стороны специалиста, но и использования передового оборудования и техник хирургического вмешательства. Точность переноса плана на практику напрямую влияет на успех всего лечения, подчеркивая важность интеграции цифровых технологий в клиническую практику. Таким образом, сочетание тщательного предварительного планирования с мастерством его исполнения определяет путь к достижению наилучших результатов имплантации для каждого пациента.
Глава 2. Навигационные методы
Методы переноса виртуального плана в реальность
Закончив создание виртуального плана, создав в нем идеальную расстановку имплантатов, мы сталкиваемся с проблемой: как перенести позиции имплантатов в реальность в конкретный клинический случай реального пациента?
Для переноса положения нам необходимо: во-первых, точно перенести центр имплантата для правильного инициирующего сверления; во-вторых, выполнить максимально точно пилотное сверление, следуя спроектированному направлению в трех плоскостях; в-третьих, глубина сверления должна соответствовать необходимой для данного имплантата. И в заключение, необходимо идентичное трехмерное расположение имплантата. Существует несколько методик переноса плана позиционирования имплантатов в реальность.
Эмпирическое позиционирование
В этом случае мы работаем, как говорится, на глаз, создавая остеотомическое ложе и выполняя установку имплантатов «свободной рукой». Успешность данной методики полностью зависит от нашего мастерства. Представив будущую ортопедическую конструкцию в полости рта пациента, размещаем инициирующее сверло в предполагаемом центре коронки, пилотное сверление выполняем, соответственно, разместив сверло как можно ближе к представленному положению имплантата. Лучших результатов при использовании данной методики достигают доктора, занимающиеся ортопедией, они лучше представляют ортопедическую конструкцию.
Лучшие результаты эмпирическое позиционирование показывает при установке одиночного имплантата между естественных зубов, в этом случае будущей ортопедической конструкцией будет одиночная коронка на имплантате, которая заполнит все пустое место в зубном ряду от контакта мезиального до контакта дистального зуба. Инициирующее сверло размещается точно в центре свободного места. Направление пилотного сверления параллельно направлению длинных осей соседних зубов (ось, проходящая через центр коронки зуба и основание корня).
Однако для предотвращения ошибок необходимо оценить взаимоотношение осей имплантата и осей соседних зубов на компьютерной томографии. Данная методика не может гарантировать ни малейшего соответствия виртуальному плану, проще говоря, план позволяет выбрать имплантаты и качественно проконсультировать пациента. Естественно, не может быть и речи о работе безлоскутной техникой или использовании заранее подготовленных провизорных реставраций.
Позиционирование на основе разметки
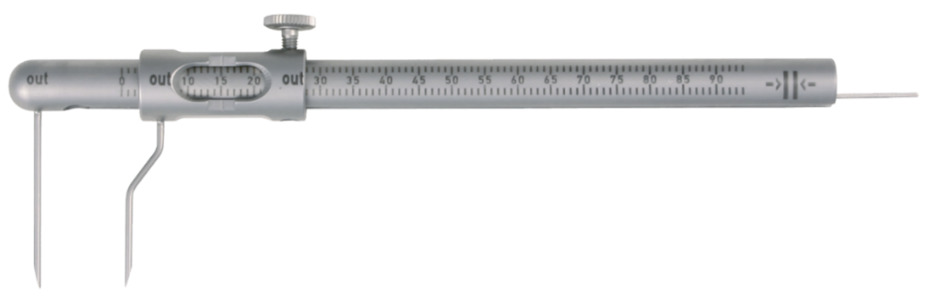
Отличной методикой определения центра имплантатов является проведение хирургических замеров. Используя специальные хирургические измерители (английское название caliper dental — штангенциркуль стоматологический), мы сможем перенести размеры с нашего плана непосредственно в полость рта пациента. Для имплантологии применяются два основных вида измерителей: цилиндрический измеритель и измеритель Кастровьехо. Удобнее использовать цилиндрический измеритель, с помощью этого инструмента и компьютерного планирования мы получаем хорошие результаты.

После завершения планирования имплантации в компьютерной программе необходимо измерить размеры от абсолютных ориентиров. Абсолютные ориентиры — анатомические образования, одинаково хорошо визуализируемые и на компьютерной томографии, и в полости рта, к ним относятся естественные зубы, ранее установленные имплантаты, края альвеолярных лунок и костные выступы, не покрытые слизистой.
Так как слизистая оболочка не рентген-контрастна, то отображение ее на компьютерной томографии недостаточно четкое для принятия ее в учет, однако при совмещении рентгенографических данных с цифровыми оттисками мы получим цифровую модель с точным отображением слизистой оболочки и тогда сможем ее учитывать и проводить измерения от покрытых слизистой анатомических ориентиров, что важно при использовании безлоскутного доступа.
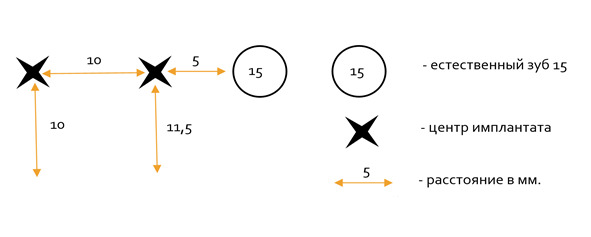
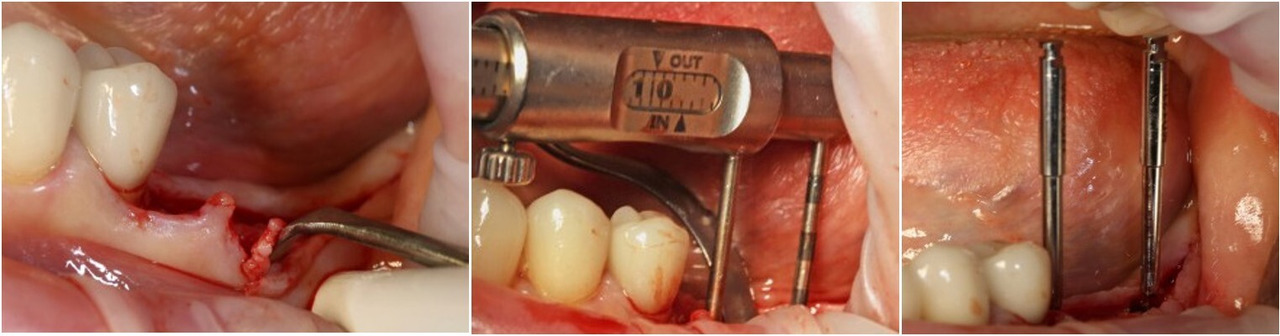
Выбрав абсолютный ориентир (допустим, дистальная сторона естественного зуба), отмеряем от него расстояние до центра будущего имплантата, дальше, если необходимо, отмеряем расстояние до следующего имплантата и так далее. То есть с помощью этого циркуля в полости рта необходимо выполнить разметку и согласно ей проводить установку имплантатов. Тогда имплантаты попадут в центр коронок либо в анатомические образование точно по созданному нами плану.
Для удобства работы можно выразить все необходимые размеры в своеобразном чертеже, зарисовав основные аспекты плана имплантации. Пример плана приведен на рисунке. Эта простая схема, расположенная на виду в операционной, поможет уверенно позиционировать имплантаты, особенно в тех случаях, когда нет доступа к компьютеру с томографией.
Хотя эта методика при определенных навыках может достаточно точно перенести центр для установки имплантата и длину остеотомического ложа, трехмерное направление остеотомии и расположение имплантата хирург контролирует по-прежнему эмпирически. Следовательно, в сложной клинической ситуации хирург может допустить ошибку при позиционировании имплантата. Также, всегда существует риск повреждения важных анатомических структур.
Методики навигационной имплантологии
В случае использования позиционирования на основе разметки, как и при эмпирическом позиционировании, выполнение остеотомии и установка имплантата проводится «свободной рукой», что не может обеспечить высокую точность из-за отсутствия наведения или навигации. В отличии от этого, навигационная имплантология — это несколько методик, обеспечивающих контроль положения инструмента во время выполнения манипуляций, что позволяет значительно увеличить точность переноса виртуального плана в реальность клинического случая.
Для переноса виртуального планирования имплантата в реальность используются различные методики и инструменты, способствующие точной реализации плана лечения. Вот основные из них:
• Статическая навигационная имплантология. Это метод переноса позиций имплантатов при помощи хирургических шаблонов: на основе виртуального планирования создаются индивидуальные хирургические шаблоны, которые обеспечивают точное позиционирование имплантатов в соответствии с предварительным планом.
• Динамическая навигационная имплантология. Этот метод предполагает использование системы динамической навигации (DNS), представляющей установку с оптическими или лазерными датчиками и компьютерным управлением, изначально разработанную для точной установки имплантата и позволяющую в режиме реального времени предоставлять врачу информацию о положении инструмента и траектории сверления, согласно подготовленному заранее плану.
• Роботизированная имплантология: Роботизированные системы могут использоваться для выполнения установки имплантатов, точно следуя виртуальному плану и полностью исключая участие человека в процедуре установки имплантата, что минимизирует риск человеческой ошибки. Роботизированная имплантология является дальнейшим развитием динамической навигационной имплантологии, из которой исключено звено, создающее ошибки — хирург.
Навигационная имплантологическая хирургия или компьютерно-ассистированная имплантация (CAIS) делится на две основные категории: статическую (sCAIS) и динамическую хирургию (dCAIS). Термин «статический» означает, что хирургическая фреза направляется в определенное положение для создания запланированной остеотомии, тогда как термин «динамический» означает, что положение хирургической фрезы отслеживается в реальном времени, когда хирург манипулирует наконечником, и проверяется соответствие положения фрезы заранее подготовленному виртуальному плану. План отображается на экране во время выполнения остеотомии, поэтому можно измерить отклонение сверла и предупредить хирурга о недопустимом отклонении. Для этого в динамической хирургии используется сложное устройство (установка динамической навигационной хирургии), отслеживающее положение наконечника относительно виртуальной модели пациента. В отличие от этого, в статической навигационной хирургии для направления фрезы используется заранее изготовленный шаблон.
Важно отметить, что как динамическая, так и статическая навигационная хирургия руководствуются предыдущим виртуальным планированием, опирающимся на заранее собранную информацию, и могут транслировать ошибки, которые были допущены на этапе планирования или сбора информации. Динамическая хирургия не позволяет визуализировать анатомию костей пациента в реальном времени; вместо этого он предлагает отслеживание и визуализацию положения фрезы на виртуальной модели, созданной заранее. Эту методику часто путают с хирургией под постоянным рентгеновским контролем, используемой в общей медицине, в которой КТ или МРТ в реальном времени используются для визуализации поражения и визуализации хирургических инструментов. Важно отметить, что хирургия под постоянным рентгеновским контролем не применяется в стоматологии из-за огромных лучевых нагрузок.
Разница между статической и динамической навигационной хирургией заключается в возможности модификации протокола во время операции при использовании динамического подхода и отсутствии такой возможности при использовании статического подхода. Следовательно, так как статические протоколы не допускают модификаций, то если запланированная остеотомия не соответствует клинической ситуации пациента, операция больше не может продолжаться по навигационному протоколу, и поэтому шаблон отбрасывается, а хирургу приходится либо перейти на работу «свободной рукой», либо прекратить операцию. Таким образом, сбор данных и виртуальное планирование имеют решающее значение для достижения точного результата в обоих протоколах.
Статическая навигационная имплантология
Статическая навигационная имплантология — это метод переноса виртуальных позиций имплантатов в реальность при помощи хирургических шаблонов, изготовленных на основе виртуального планирования. Хирургический шаблон направляет хирургические фрезы и имплантат при его установке с помощью своих навигационных втулок, чем обеспечивает точную установку имплантата по заранее подготовленному хирургическому плану с минимальным риском отклонения от заданных параметров, что значительно улучшает исходы лечения и безопасность пациентов.
Преимуществами данного подхода являются:
• Высокая точность: навигационные шаблоны обеспечивают достаточно точное соблюдение плана установки имплантатов, что исключает большую часть человеческих ошибок.
• Снижение рисков: минимизация вероятности повреждения критически важных структур, таких как нервы и кровеносные сосуды, благодаря точному планированию.
• Сокращение времени операции: предварительное планирование и использование шаблона сокращают продолжительность хирургического вмешательства и упрощают сам процесс имплантации.
• Минимальная инвазивность: так как процедура спланирована заранее, нет необходимости в широком хирургическом доступе и визуализации костной ткани во время операции, что позволяет существенно снизить хирургическую травму вмешательства, это способствует более быстрому и менее болезненному восстановлению.
• Лучшая эстетика и функциональность: тщательное планирование с учетом дизайна будущего протезирования позволяет учитывать эстетические и функциональные аспекты будущего зубного протеза, позволяя обеспечить оптимальный результат.
Статическая навигационная имплантология применяется в различных клинических случаях, от установки одиночных имплантатов до полной реабилитации беззубых челюстей. Она особенно ценится в сложных случаях, где требуется высокая точность для минимизации рисков и достижения оптимальных результатов.
Однако, несмотря на растущую популярность использования навигационных шаблонов, разные авторы по-разному оценивают необходимость их использования с точки зрения возможности выполнить запланированную ортопедическую реставрацию. Так по мнению Hans-Joachim Nickenig и соавторов опубликованному в статье Evaluation of the difference in accuracy between implant placement by virtual planning data and surgical guide templates versus the conventional free-hand method (2010), применение хирургических шаблонов позволяет значительно увеличить точность установки имплантатов, по сравнению с установкой без использования навигационных шаблонов.
Jakob Brief и соавторы, проведя исследование Accuracy of image-guided implantology (2005), пришли к выводу, что в подавляющем большинстве случаев клиницист может установить имплантат в правильном положении без использования шаблона, хотя хирургия по шаблонам все же увеличивает точность имплантации. Следует отметить, что все упомянутые выше исследования направлены на оценку эффективности шаблонов по сравнению с традиционной методикой имплантации, а не на измерение отклонения положения имплантата, установленного с помощью шаблона, от положения, выбранного в ходе компьютерного планирования лечения.
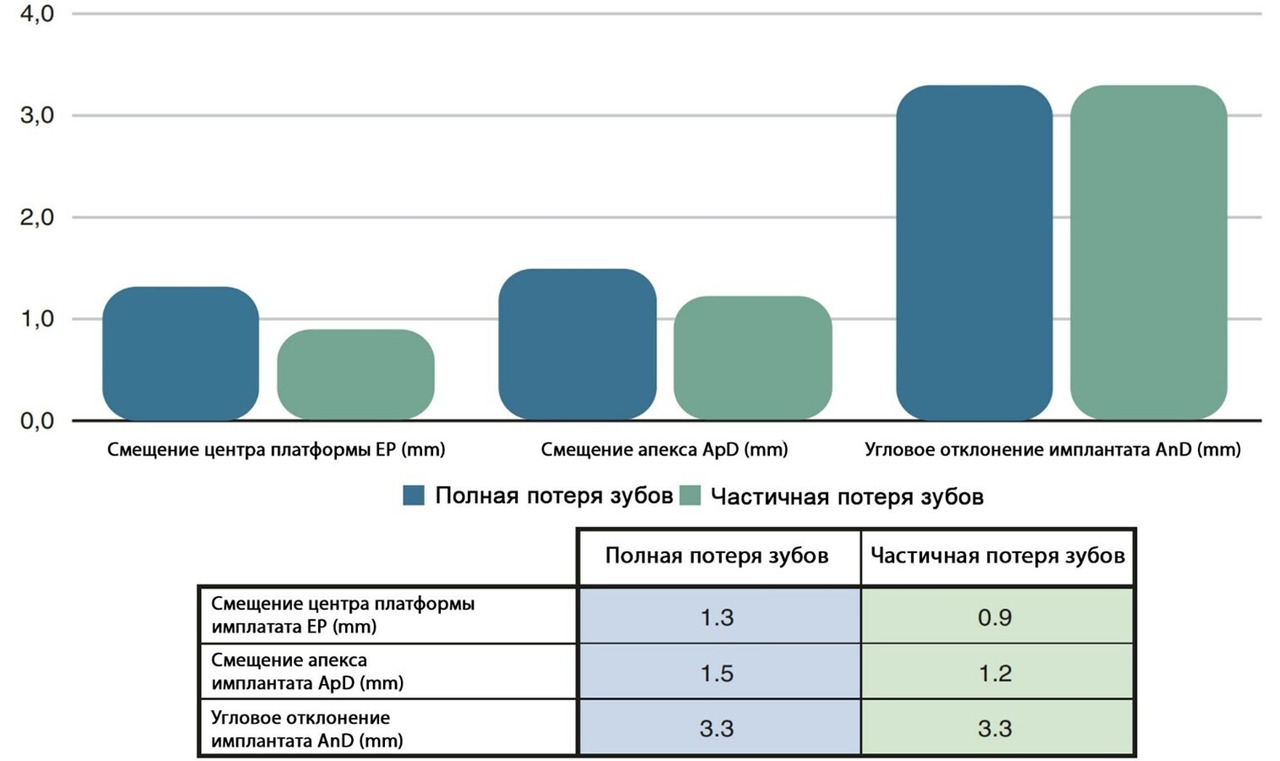
Исследователи Younes F, Cosyn J, De Bruyckere T, Cleymaet R, Bouckaert E, Eghbali A. в работе «A randomized controlled study on the accuracy of free-handed, pilot-drill guided and fully guided implant surgery in partially edentulous patients» оценили отличие конечного положения имплантата от планируемого в рандомизированном клиническом исследовании, сравнивая традиционную имплантацию «свободной рукой», имплантацию с пилотным сверлением, выполненным по шаблону, и имплантацию по полному навигационному протоколу. Оценка включала угловое отклонение имплантата (AnD), смещение центра платформы имплантата (EP) и смещение апекса имплантата (ApD).
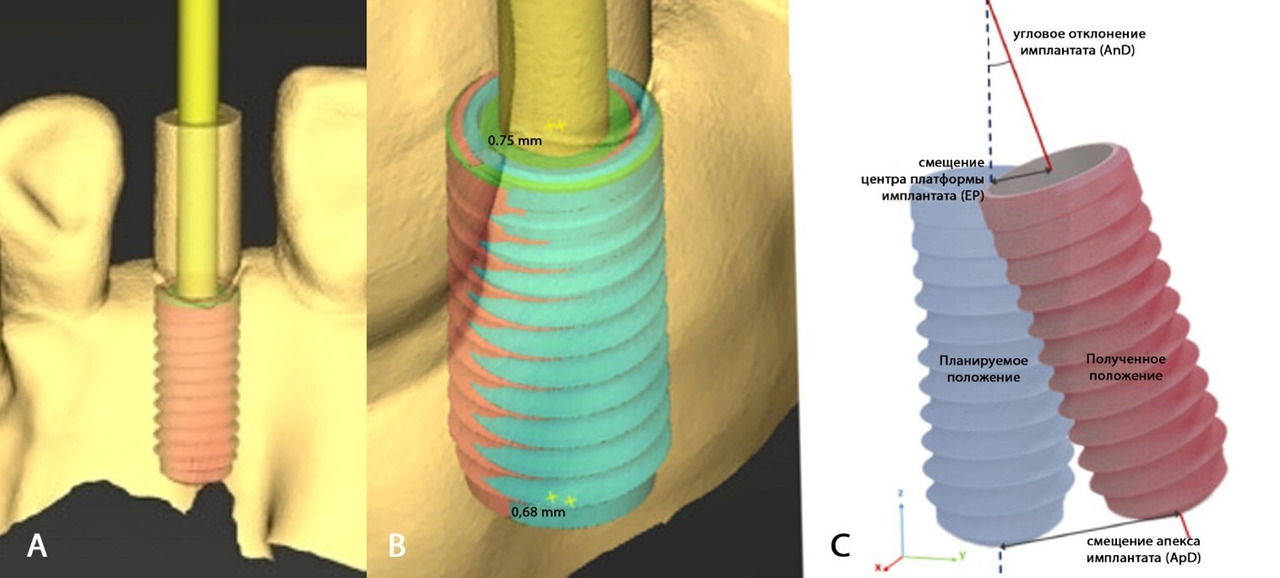
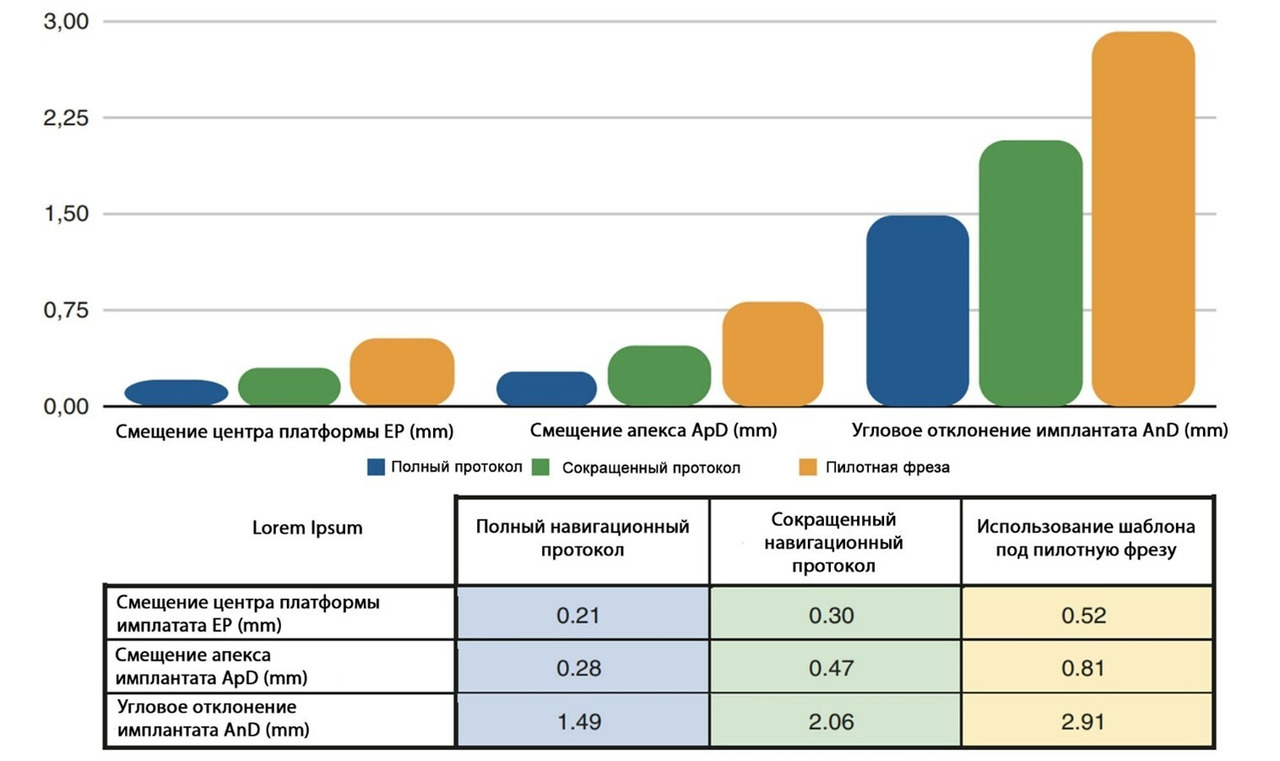
Кроме того, Behneke A, Burwinkel M, Behneke N. В статье «Factors infuencing transfer accuracy of cone beam CT-derived template-based implant placement» также оценили те же параметры в другом рандомизированном клиническом исследовании, сравнив имплантаты, установленные по трем навигационным протоколам: протоколу пилотного сверления, сокращенному навигационному протоколу и полному навигационному протоколу; сравнение с традиционной установкой имплантатов методом «свободной руки» не проводилось. Результаты обоих исследований можно увидеть (Рис. 2.8 и 2.9).
Результаты этих исследований показывают, чем больше манипуляций по установке имплантата проводятся с поддержкой навигационным шаблоном, тем выше точность. Таким образом, полный навигационный протокол является наиболее точной техникой, за которой следуют сокращенный навигационный протокол и далее протокол пилотного сверления. Важно отметить, что все имплантаты, установленные по навигационным протоколам, показали значительно лучшие результаты, чем имплантаты, установленные традиционным подходом «свободной рукой».
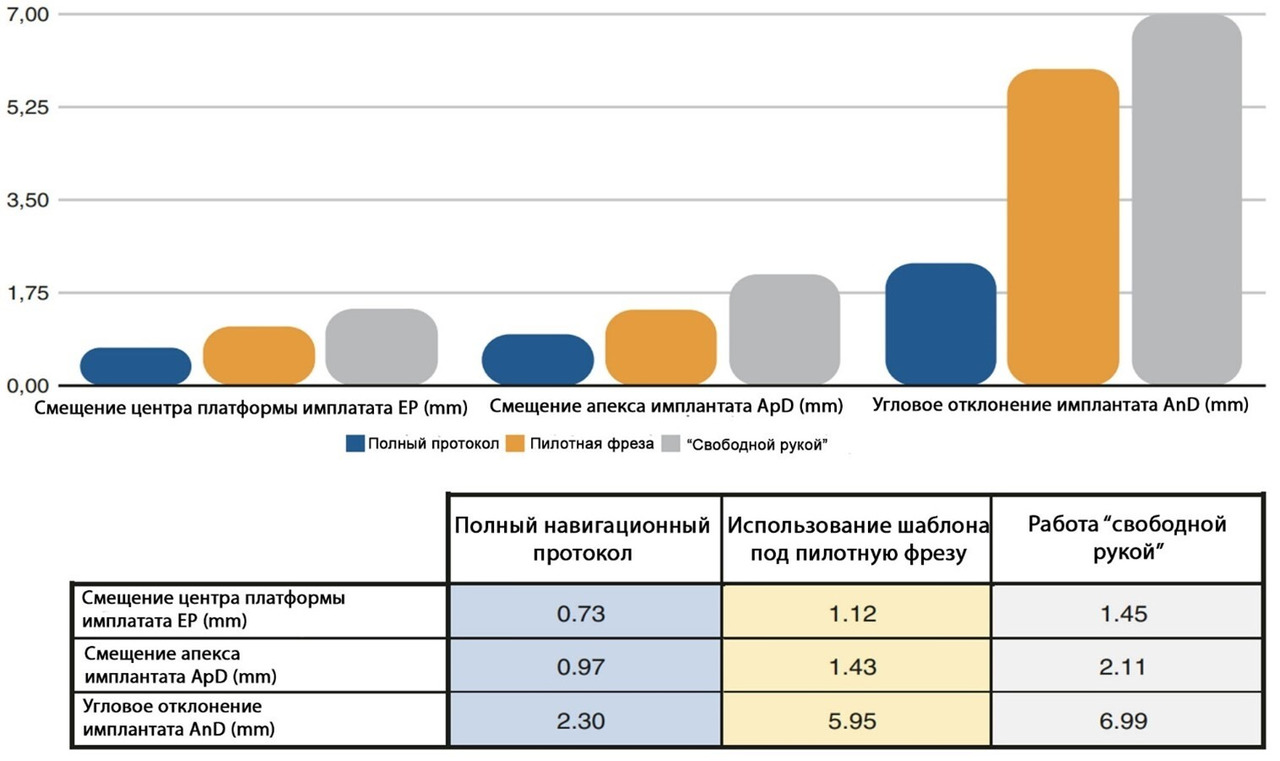
Значения смещение центра платформы имплантата (EP) и смещение апекса имплантата (ApD) меньше 2 мм считаются приемлемыми для клинической практики. Несмотря на имеющиеся в исследовании вариации, самые худшие клинические результаты составили 2 мм для случаев, выполненных с использованием полного навигационного протокола, и 5 мм для традиционной имплантационной хирургии методом «свободной руки». Следовательно, ортопедические и биологические риски могут быть минимизированы с помощью методик навигационной имплантологии.
Кроме того, исследование Younes и соавторы включает интересный вторичный результат относительно постоянного протезирования на установленных имплантатах. Хотя все коронки в исследовании планировалось выполнить с винтовой фиксацией из-за невозможности обеспечить пассивность посадки, в следующих случаях пришлось установить реставрации с цементной фиксацией:
• 5 из 26 (19,2%) случаев в группе имплантатов, установленных по традиционному протоколу «свободной рукой».
• 1 из 24 (4,2%) случаев в группе имплантатов, установленных по протоколу пилотного сверления.
• 0 из 21 (0%) случаев в группе имплантатов, установленных по полному навигационному протоколу.
Исследование Tahmaseb A, Wu V, Wismeijer D, Coucke W, Evans C., опубликованное в статье «The accuracy of static computer-aided implant surgery: a systematic review and meta-analysis», освещает сравнение точности переноса положения имплантата из цифрового плана в клиническую ситуацию, используя те же параметры: угловое отклонение имплантата (AnD), смещение центра платформы имплантата (EP) и смещение апекса имплантата (ApD). Проведено сравнение группы случаев, когда имплантаты устанавливались по полному навигационному протоколу при частичной адентии и навигационные шаблоны опирались на оставшиеся зубы, и группы, в которой из-за полной адентии вынуждены были использовать шаблоны с опорой на слизистую.
Опираясь на данные, полученные в этих исследованиях, можно однозначно утверждать, что использование методик навигационной хирургии значительно улучшает точность имплантации. Тем не менее, так как максимальные погрешности метода укладываются в 2 мм, необходимо, несмотря на использование навигационных подходов, не пренебрегать зонами безопасности в 2 мм, стараться сохранять зоны безопасности от всех важных анатомических образований. Также клиницистам необходимо уделять больше внимания и проявлять большую аккуратность при создании шаблонов с опорой на слизистую оболочку.
Навигационные шаблоны увеличивают точность позиционирования имплантата, однако их применение сопряжено с рядом сложностей. Во-первых, при использовании хирургических шаблонов уменьшается размер операционного поля, что может существенно усложнить проведение манипуляций. Во-вторых, точность установки имплантата напрямую зависит от стабильности шаблона.
Статическая навигационная имплантология стала неотъемлемой частью современной имплантологии, позволяя стоматологам достигать предсказуемых результатов, минимизируя при этом риски и неудобства для пациентов. Именно статическая навигационная имплантология будет подробно рассмотрена в данном руководстве, так как по мнению авторов в сегодняшней действительности это преимущественный метод, который можно рекомендовать к внедрению в каждую клиническую практику.
Динамическая навигационная имплантология
Динамическая навигационная имплантологическая хирургия или динамическая компьютерно-ассистированная имплантация (dCAIS) позволяет хирургу вносить изменения как во время планирования, так и во время операции. Фактически динамические техники позволяют визуализировать и проверять хирургическое лечение в реальном времени. Это компьютерная технология, которая устраняет необходимость в навигационных шаблонах, используя вместо этого визуализацию положения инструмента на виртуальной модели в реальном времени.
Существуют два разных типа систем навигации — оптическая и электромагнитная. В оптических системах навигации (ONS) оптический датчик, представленный несколькими камерами, отслеживает положение инструмента в реальном времени, используя для этого оптически маркированные трекеры, прикрепленные к пациенту и к используемому инструменту. В общей медицине ONS используются в оториноларингологии, неврологии, ортопедии, вертебральной хирургии, интервенционной радиологии и челюстно-лицевой хирургии. Электромагнитные системы (EMS) используются в оториноларингологии, интервенционной радиологии и неврологии, в стоматологии EMS не используются.
В настоящее время, насколько известно автору, в стоматологии по всему миру в клинической практике используются семь оптических систем: Navident 4 от ClaroNav Technologies, X-Guide от Nobel Biocare, Image Guided Implantology («IGI») от Image Navigation Ltd, Implant Real-time Imaging System (IRIS) от EPED, Inliant oт Navigate Surgical, ImplaNav от Bresmedical Pty Ltd., Falcon от Straumann.

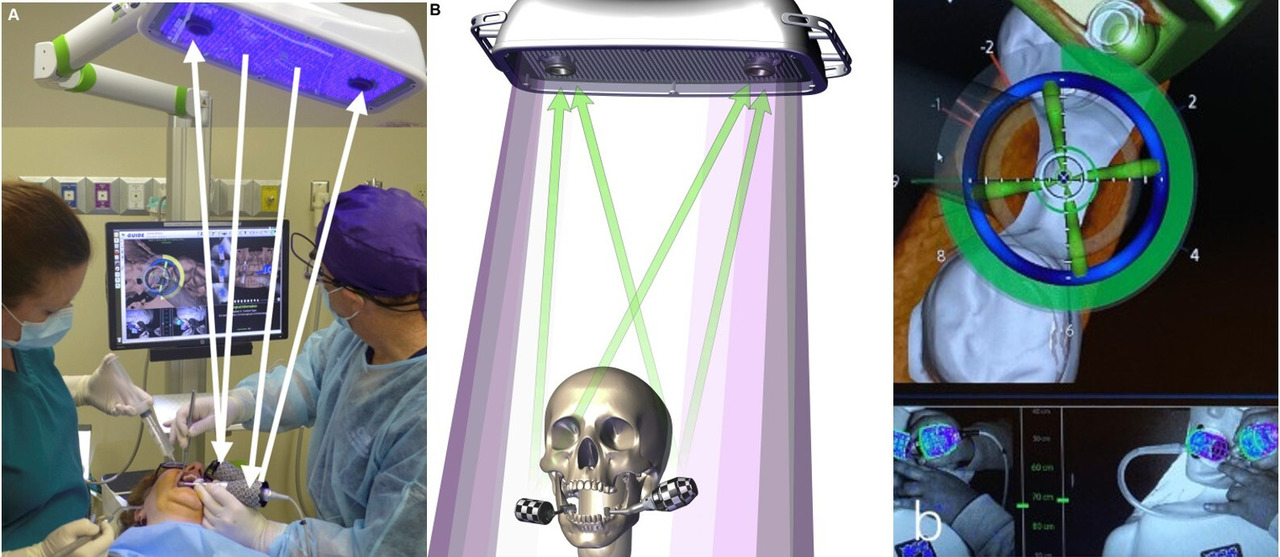
Рабочий процесс начинается с создания детального 3D-плана установки имплантата на основе данных конусно-лучевой компьютерной томографии (КЛКТ) пациента и данных объемного сканирования полости рта, что позволяет тщательно спланировать положение, наклон и глубину установки имплантата с учетом всех анатомических особенностей. Перед процедурой система калибруется для точного совпадения с реальным положением челюсти пациента, используя специальные трекеры или маркеры, которые фиксируются на челюсти и на хирургических инструментах.
Во время операции система отслеживает движения инструментов и сравнивает их с предварительным планом, отображая данные на экране монитора. Это позволяет хирургу видеть, как его действия соотносятся с анатомией пациента, и при необходимости адаптировать процесс остеотомии и установки имплантата для достижения максимальной точности. Система обеспечивает непрерывную обратную связь, что позволяет хирургу корректировать свои действия в соответствии с планом, значительно снижая риск ошибок и повышая точность.
Многие исследования оценивали точность динамических систем навигации. «Gunkel AR, Freysinger W, Thumfart WF. Experience with various 3-dimensional navigation systems in head and neck surgery, Siessegger M, Mischkowski RA, Schneider BT, Krug B, Klesper B, Zöller JE. Image guided surgical navigation for removal of foreign bodies in the head and neck, Eggers G, Haag C, Hassfeld S. Image-guided removal of foreign bodies а также Wanschitz F.» и соавторы в «Evaluation of accuracy of computer-aided intraoperative positioning of endosseous oral implants in the edentulous mandible» сообщили о точности переноса виртуального положения имплантата 1—2 мм in vitro при использовании систем динамической навигации первого поколения.
«Somogyi-Ganss E, Holmes HI, Jokstad A. Accuracy of a novel prototype dynamic computer-assisted surgery system» использовали ранний прототип системы Navident, для выполнения 80 in vitro остеотомий. Они сообщили о погрешности 1,14 мм для центра платформы имплантата (EP), 1,71 мм для апекса имплантата (ApD) и 2,99° для углового отклонения имплантата (AnD). Wagner A и соавторы в «Computer-aided placement of endosseous oral implants in patients after ablative tumour surgery: assessment of accuracy» установили 32 имплантата 5 пациентам и сообщили о угловом отклонении имплантата (AnD) 6,4 градуса с диапазоном от 0,4 до 13,3 градусов.
Jorba-García A и соавторы в статье «Accuracy and the role of experience in dynamic computer guided dental implant surgery: an in-vitro study» установили in vitro 36 имплантатов, 18 без навигации методом «свободной руки» и 18 с использованием системы динамической навигации. Они сообщили о значительно более высокой точности для всех изученных переменных. Погрешности переноса запланированного положения имплантата при использовании системы динамической навигации составили 1,29 мм для центра платформы имплантата (EP), 1,32 мм для апекса имплантата (ApD), и 1,6 градуса для углового отклонения имплантата (AnD); в то время как при использовании метода «свободной руки» они сообщили об отклонении 1,5 мм для центра платформы имплантата (EP), 2,26 мм для апекса имплантата (ApD) и 9,7 градусов для углового отклонения имплантата (AnD).
В статье «Block M, Emery R, Lank K, Ryan J. в Implant placement accuracy using dynamic navigation» упоминается о точности установки, полученной тремя хирургами, используя систему навигации второго поколения (X-Guide, X-Nav Technologies) для лечения 100 пациентов. Отклонения также сравнивались с точностью метода «свободной руки». Включались только частично беззубые случаи, поскольку для удержания специальной клипсы, обеспечивающей навигацию, требовалось минимум три соседних зуба. Средние (SD) отклонения с X-Guide составили 0,87 мм для центра платформы имплантата (EP), 1,56 мм для апекса имплантата (ApD) и 3,62 градуса для углового отклонения имплантата (AnD). Для метода «свободной руки» отклонения имели соответствующие средние значения (SD) 1,15 мм, 2,51 мм и 7,69 градусов. Статистически значимых различий между результатами отдельных хирургов при работе с навигационной системой не наблюдалось.
Pellegrino G, и соавторы в материале «Dynamic navigation: a prospective clinical trial to evaluate the accuracy of implant placement», наблюдали 10 пациентов, у которых было установлено 18 имплантатов с использованием системы динамической навигации ImplaNav от Bresmedical Pty Ltd. Они сообщили о средних значениях погрешности переноса данных виртуального планирования 1,04 ± 0,47 мм для центра платформы имплантата (EP), 1,35 ± 0,56 мм для апекса имплантата (ApD), 0,43 ± 0,34 мм отклонения глубины установки имплантата и 6,46 ± 3,95 градуса для углового отклонения имплантата (AnD).
Stefanelli LV и соавторы в статье «Accuracy of a dynamic dental implant navigation system in a private practice», сообщили о ретроспективном исследовании 231 имплантате, установленных с использованием динамической навигационной системы Navident от Claronav, среднее отклонение составило 0,71 мм для центра платформы имплантата (EP), 1,0 мм для апекса имплантата (ApD), 2,26 градуса для углового отклонения имплантата (AnD).
Как видно из приведенных исследований, в настоящее время динамическая навигация и статическая навигация обеспечивают сопоставимую точность переноса виртуального положения имплантатов in-vivo, динамический подход предлагает следующие преимущества:
• Высокая точность: Динамическая навигационная хирургия (DSN) обладает большей точностью переноса положения имплантата по сравнению с установкой имплантатов «свободной рукой» и немного большей, но сопоставимой точностью переноса данных с навигационными шаблонами.
• Не используются навигационные шаблоны: несмотря на все преимущества навигационных шаблонов, уменьшение высоты доступа в дистальных областях остаются проблемой этого метода. Одним из наибольших преимуществ DSN перед навигационными шаблонами является возможность обойти это препятствие, позволяя врачу ориентировать фрезы под углом, достаточным для преодоления вертикальных ограничений, до тех пор, пока не будет получен достаточный доступ, а затем корректировать ориентацию фрезы для получения идеального положения имплантата. В узких межзубных пространствах, например, у нижних резцов, DSN превосходит навигационные шаблоны, поскольку оно не ограничено размерами направляющих втулок. Другие недостатки навигационных шаблонов — это невозможность изменить план во время операции, трудности с обеспечением адекватной ирригации хирургических фрез, ограниченная или полностью отсутствующая визуализация операционного поля, зависимость точности от посадки шаблона, увеличение стоимости лечения и время ожидания, необходимое для изготовления шаблона.
• Универсальность: DSN не зависит от системы имплантатов (можно использовать любую систему имплантатов). Хирургический план может быть изменен в любое время, даже во время операции с минимальной задержкой. Внутриоперационные отклонения от предварительно определенного хирургического плана видны оператору в реальном времени, что позволяет немедленно вносить коррективы. DSN позволяет прямую визуализацию операционного поля в любое время. Наконец, DSN может быть независимым от инструмента, обеспечивая большую гибкость врачу, что достигается за счет нанесения координатных тегов на различные инструменты, такие как турбинный или низкоскоростной наконечники, ультразвуковой скейлер и другие. Однако это в настоящее время верно только для одной из навигационных систем, Navident от ClaroNav.
• Проверка в реальном времени: DSN позволяет проводить проверку в реальном времени остеотомий и установленных имплантатов, а также реставрацией.
• Визуализация в реальном времени: DSN позволяет в реальном времени визуализировать окружающие анатомические структуры. Это критически важно, когда вмешательство проходит около нижнего альвеолярного нерва (IAN), ментального отверстия, верхних пазух, птеригоидного комплекса, а также вблизи соседних зубов или имплантатов.
• Эргономика: Оператор не смотрит вниз и/или не наклоняется к операционному полю. Вместо этого врач смотрит прямо на компьютерный экран на навигационной установке, сохраняя правильную осанку.
• Независимость от фидуциальных маркеров: хотя это преимущество в настоящее время доступно только в одной системе (Navident от ClaroNav), независимость от фидуциальных маркеров означает, что система использует высококонтрастные ориентиры, уже существующие у пациента (зубы, кость), вместо внешних фидуциальных маркеров, встроенных в стент. Отсутствие необходимости изготовления предоперационного стента и возможность использовать одно изображение CBCT для диагностики, планирования и выполнения операции — это два наибольших преимущества независимости от фидуциальных маркеров.
Как видно, динамические навигационные системы обеспечивают немного большую, но сопоставимую с навигационными шаблонами точность переноса данных виртуального планирования в реальность клинического случая, к тому же они имеют значительно меньше ограничений по сравнению со статической навигацией. И все же, высокая стоимость и отсутствие поддержки пользователей в России не позволили автору оценить использование динамических навигационных систем в своей практике.
Роботизированная имплантология
Роботизированная хирургия в общей хирургии уже давно не является фантастикой, и ее клиническое применение стремительно развивается из-за ее высокой точности и минимальной инвазивности. В 1996 году была разработана хирургическая роботизированная система Da Vinci Surgical Robot System (Intuitive Surgical, Калифорния, США), и хирургические роботы этой системы добились больших успехов в медицинской сфере, сделав сложные операции более безопасными и менее инвазивными.
С появлением хирургической роботизированной системы Da Vinci Surgical Robot System многие ученые начали применять роботов в стоматологии, включая эндодонтию, ортодонтию, челюстно-лицевую хирургию, протезирование и имплантологию. В 2004 году Butscher W и соавторы в статье «Robot and method for bending orthodontic archwires and other medical devices» описали, как изобрели робота для гибких дуг под названием «SureSmile», который может изгибать ортодонтические дуги для каждой клинической ситуации автоматически и более точно, чем человек.

В 2010 г. Burgner J и соавторы в материале «Ex vivo accuracy evaluation for robot assisted laser bone ablation» упоминают о том, как успешно изготовили робота для проведения ортогнатической остеотомии на основе короткоимпульсной лазерной абляции. В 2014 году Wang DX и соавторы в статье «Preliminary study on a miniature laser manipulation robotic device for tooth crown preparation» описывают, как разработали миниатюрное роботизированное устройство, выполняющее автономное препарирование зубов под коронки.
В 2017 году был разработан первый в мире коммерческий стоматологический робот Yomi, одобренный для клинического применения в Соединенных Штатах Америки управлением по санитарному надзору за качеством пищевых продуктов и медикаментов США. Так же, как и Da Vinci, робот Yomi является полуавтономным роботом, и для выполнения имплантации ему требуется управление хирурга. В 2021 году Bolding и соавторы в исследовании «Accuracy of haptic robotic guidance of dental implant surgery for completely edentulous arches» использовали Yomi для установки 38 имплантатов и сообщили о угловом отклонении имплантата (AnD) 2,56 ± 1,48 градуса, смещении центра платформы имплантата (EP) 1,04 ± 0,70 мм и смещении апекса имплантата (ApD) 0,95 ± 0,73 мм.
В конце 2017 г. Zhao и соавторы представили первую в мире полностью автономную систему установки зубных имплантатов (Yakebot, Beijing, China), описанную в статье «Madfa AA, Senan EM, Yue X-G. Autonomous robotics: a fresh era of implant dentistry… is a reality! Tensile stress distribution in maxillary central incisors restored with cast-made and prefabricated dental posts», чем открыли цифровую эру дентальной имплантации. В эксперименте, выполненном на животных в 2021 г. Bai SZ, Ren N, Feng ZH и соавторы статьи «Animal experiment on the accuracy of the autonomous dental implant robotic system», упомянули результаты показавшие, что погрешность для центра платформы имплантата (EP) составила 0,27 ± 0,15 мм, погрешность для апекса имплантата (ApD) 0,25 ± 0,22 мм, погрешность для углового отклонения имплантата (AnD) 0,99 ± 0,52 градуса. Это доказало, что система Yakebot более точна, чем любые другие методы переноса виртуального планирования в реальную клиническую ситуацию.
В начале 2021 года Национальное управление по медицинским продуктам Китая санкционировало две автономные роботизированные системы для имплантации зубов: Remebot (регистрационный номер 20213010713) и Yakebot (регистрационный номер 20213010215). Remebot и YakeBot являются полностью автономными роботизированными системами, их роботизированные манипуляторы могут выполнять хирургические вмешательства без участия человека. В 2022 году Yang и соавторы использовали Remebot для тотальной реабилитации беззубого пациента, получили результаты точности переноса: погрешность для центра платформы имплантата (EP) составила 0,56 ± 0,24 мм, погрешность для апекса имплантата (ApD) 0,61 ± 0,23 мм и погрешность для углового отклонения имплантата (AnD) 0,99 ± 0,52 градуса.

Преимущества роботизированной имплантологии:
• Самая высокая точность: Роботизированные системы обеспечивают самую высокую точность переноса позиции имплантата из виртуального плана в реальную клиническую ситуацию, сводя на нет риск отклонения имплантата от оптимального положения.
• Минимизация хирургических рисков: Автоматизированный контроль за процессом установки имплантатов существенно снижает вероятность повреждения окружающих тканей и анатомических образований.
• Минимальная инвазивность наряду с высокой скоростью. Эффективность роботизированных систем значительно сокращает продолжительность хирургического вмешательства, а также обеспечивает минимальную инвазивность процедуры, что способствует более быстрому восстановлению пациента.
Роботизированная имплантология находит применение во многих клинических случаях от простых до сложных, включая установку одиночных имплантатов, полную реабилитацию беззубого челюстного отдела и случаи с ограниченным количеством костной ткани. Роботизированные системы могут быть использованы для выполнения как стандартных, так и комплексных процедур с улучшением качества и предсказуемости исхода.

Робот YakeBot для автономной челюстно-лицевой хирургии является самым выдающимся продуктом среди роботизированных имплантологических систем. Этот робот разработан для того, чтобы помочь хирургам точно выполнять малоинвазивные операции по установке имплантатов с субмиллиметровой точностью. Перед операцией необходимо провести анализ мягких и твердых тканей, а также спланировать операцию по установке имплантатов с помощью прилагаемого программного обеспечения. Во время операции, с помощью высокоточных датчиков технического зрения и динамических датчиков силы, робот точно ориентируется и выполнит подготовку остеотомических каналов. Необходимых для установки имплантатов, а также установку имплантатов. Врач может управлять роботом с помощью контрольной педали.
Благодаря своим передовым возможностям этот робот может значительно улучшить навыки стоматолога, а также увеличить безопасность пациента и создать для него позитивный опыт. Компания Beijing Yakebot Technology Co., Ltd., разработавшая робота YakeBot, любезно предоставила материалы: полное описание, научные статьи и клинические случаи применения робота YakeBot в имплантологии.

Клинический случай установки имплантатов с помощью автономного робота для стоматологической имплантации (autonomous dental implant robot (ADIR)) с последующей немедленной нагрузкой
выполнен: Zhiwen Li, DDS, PhD, Rui Xie, MSD, Shizhu Bai, DDS, PhD, and Yimin Zhao, DDS, PhD (любезно предоставлен компанией Beijing Yakebot Technology Co., Ltd)
61-летняя женщина обратилась в Центр цифровой стоматологии Школы стоматологии Четвертого военно-медицинского университета с жалобой на снижение жевательной функции из-за потери второго премоляра и первого моляра нижней челюсти справа. Предоперационная оценка включала общее и стоматологическое обследование, после чего было предложено протезирование несъёмным мостовидным протезом с опорой на два имплантата и установка двух имплантатов с использованием автономного робота для стоматологической имплантации (ADIR).
Лечение было одобрено Медицинским этическим комитетом Школы стоматологии (номер одобрения IRB-REV 2020050). Было получено информированное согласие, и соблюдался принцип защиты конфиденциальности. В рамках предоперационной подготовки проведена конусно-лучевая компьютерная томография (КЛКТ) (HiRes3D; LargeV Instrument Corp) и сохранена в формате цифровой визуализации и коммуникаций в медицине (DICOM). Зубы и мягкие ткани были отсканированы с помощью внутриротового сканера (CS 3600; Carestream Dental) и экспортированы в стандартном формате тесселяции (STL). Данные DICOM и STL были импортированы в программное обеспечение для предоперационного планирования (DentalNavi; YakeRobot Technology Ltd) для трехмерной реконструкции и совмещения.
Высота и ширина альвеолярного гребня в области второго премоляра нижней челюсти справа составляли 19,0 мм и 5,8 мм, а высота и ширина альвеолярного гребня в области первого моляра нижней челюсти справа составляли 17,8 мм и 5,4 мм, что было достаточно для установки имплантатов (TX 4,0×9 мм, TX 4,0×11 мм, AstraTech OsseoSpeed; Dentsply Sirona).
Положение двух имплантатов было спланировано с учетом принципа «от коронки вниз» с расположением в центре будущей реставрации, с безопасным расстоянием не менее 2 мм от нижнего альвеолярного нерва. Временный протез был спроектирован с двумя крыльями для позиционирования в полости рта за счет окклюзионной поверхности соседних зубов. В теле реставрации спроектированы два канала, соответствующие положению временных абатментов, которые будут фиксированы к имплантатам, диаметр каждого канала на 0,6 мм больше, чем у диаметр временного абатмента.
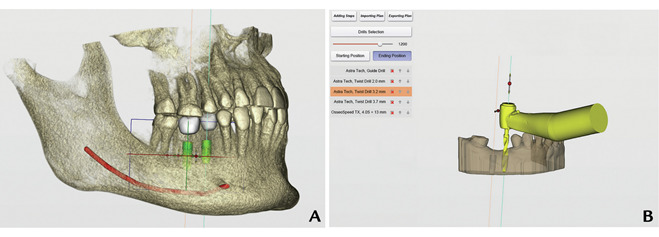
Последовательность использования фрез для остеотомий была определена в соответствии с хирургическими руководствами и качеством кости в беззубой области. Глубина, скорость вращения (менее 1200 об/мин) и подача (менее 0,5 мм/с) были установлены для каждой фрезы.
Также до операции были спроектированы хирургические аксессуары: держатель для хирургического маркера, опору для открывания рта и поддон для отсасывания крови и физиологического раствора во время остеотомии. Отверстия для контроля установки аксессуаров были спроектированы в держателе маркера и поддоне для отсасывания для интраоперационной регистрации. Временный протез, держатель маркера, опора и поддон для отсасывания были изготовлены до операции с помощью трехмерной печати (Pro S95; SprintRay Co). Постпечатная обработка: удаление поддержек, очистка и постполимеризация были выполнены в соответствии с рекомендациями производителя.
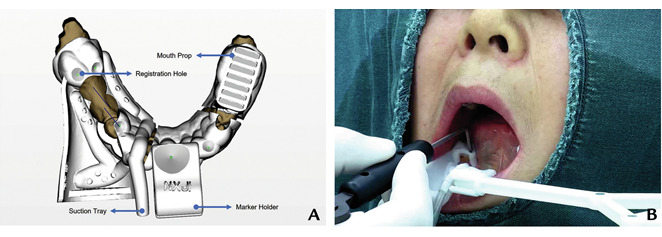
В рамках хирургического вмешательства после дезинфекции полости рта пациента (5,0 г/л йодофор; ShanDong LIRCON Medical Technology Inc Co) выполнена инфильтрационная анестезия 4% раствором артикаина с адреналином 1/100 000 (Primacaine Adrenaline; ACTEON Group). Пациентка находилась в сидячем положении в течении всей хирургической процедуры. Хирургические аксессуары были зафиксированы на зубах в полости рта. Хирургический маркер был установлен в держатель, и интраоральная регистрация маркера была завершена путем установки регистрационного зонда в 5 отверстий для регистрации поочередно.

Ручной инструмент, подключенный к концевому эффектору робота, был вручную помещен в рот пациентки хирургом и достиг запланированного начального положения сверления. Затем инструмент был удален изо рта, и путь был записан в компьютер робота путем идентификации маркера на концевом эффекторе робота с использованием активной оптической системы отслеживания позы (fusionTrack 250; Atracsys LLC).
Во время операции ADIR автономно следовал этому пути, чтобы безопасно входить и выходить изо рта, не касаясь зубов или мягких тканей. Затем ADIR автономно поэтапно выполнял остеотомии и установку имплантатов без откидывания лоскута вдоль записанных путей в соответствии с предоперационным планом. Фрезы менялись хирургом вне полости рта. Глубина и угол фрезы по сравнению с запланированным положением имплантата отображались в реальном времени на экране. Хирург постоянно контролировал процедуру через экран и управлял всеми движениями робота с помощью педали, включая вход в рот, остеотомию и выход. Хирургический план мог быть изменен во время операции, и движение робота могло быть остановлено в любое время, если это было необходимо.
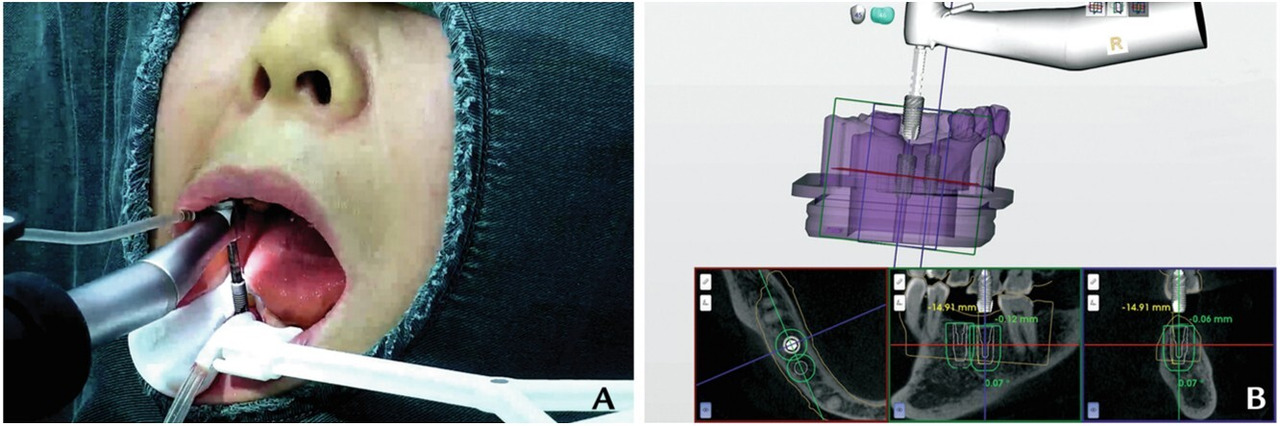
В результате два имплантата были успешно установлены ADIR в запланированные положения без каких-либо интраоперационных осложнений. Поверх имплантатов установлены скан-абатменты для внутриротового сканирования с целью оценки точности установки имплантатов. Отклонения между фактическим и запланированным положением двух имплантатов были рассчитаны в программном обеспечении.
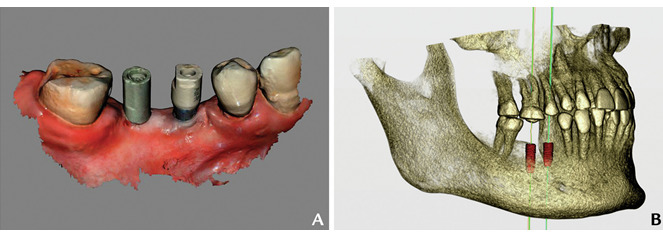
Результаты показали, что корональное отклонение составляло 0,26 мм, апикальное отклонение — 0,28 мм, а угловое отклонение — 0,40 градусов для имплантата второго премоляра нижней челюсти справа, и 0,32 мм, 0,44 мм, 1,16 градусов для имплантата первого моляра нижней челюсти справа. Послеоперационная рентгенограмма показала, что 2 имплантата были хорошо установлены и параллельны. Первичная стабильность имплантатов, установленных в области второго премоляра и первого моляра нижней челюсти справа, составляла 74 и 72 (Osstell ISQ; Osstell AB org) соответственно. Временные абатменты были фиксированы к имплантатам, после чего временный протез, изготовленный до установки имплантатов, был установлен поверх без каких-либо корректировок. Рентгенограммы через 3 месяца показали отсутствие резорбции кости вокруг двух имплантатов, и был изготовлен постоянный протез. Послеоперационных осложнений не возникло. Пациентка была удовлетворена операцией и протезированием.
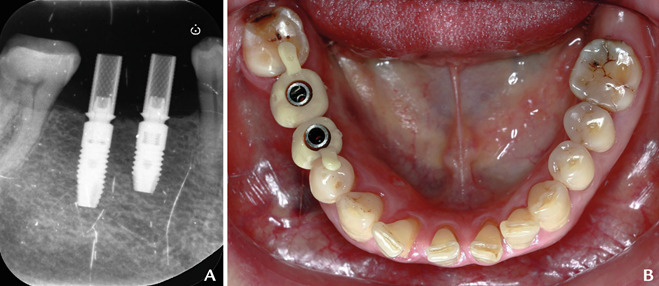
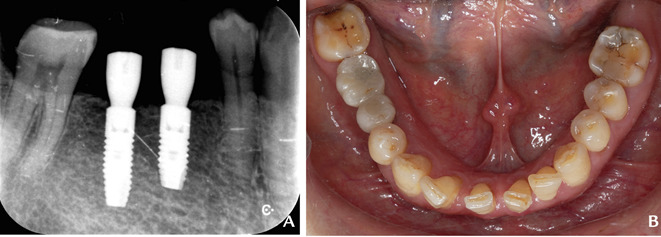
В этом клиническом случае автономный робот для стоматологической имплантации выполнил установку имплантатов с высокой точностью. Установка имплантатов с использованием ADIR обладает преимуществами статических хирургических шаблонов и динамической навигации, и при этом лишена их недостатков. Во время процедуры хирургу необходимо было только сосредоточиться на положении и угле сверла, отображаемых в реальном времени на экране, нет необходимости наблюдать за операционной зоной, также целевое положение имплантата может быть изменено в зависимости от хирургической ситуации.
Хирургический инструмент полностью контролируется роботизированным манипулятором, а не удерживается хирургом, что устраняет влияние неопытности хирурга на точность, а также может эффективно снизить утомляемость хирурга. Отсутствие необходимости держать инструмент является основным отличием автономного робота от роботов, используемых для помощи в установке имплантатов.
Операционный участок не закрыт телом шаблона, соответственно не ухудшается охлаждение хирургических фрез. Кроме того, накусочная опора может помочь пациенту долгое время держать рот открытым, а поддон для отсасывания предотвратит аспирацию жидкости пациентом в сидячем положении. Ассистент не требуется для отведения щеки и эвакуации слюны во время процедуры, что делает остеотомии более эффективными.
Безопасность является важным принципом для установки имплантатов с использованием системы ADIR. Весь процесс контролируется хирургом, а движения робота управляются педалью. Хирург может быстро остановить все действия робота в ответ на возможные чрезвычайные ситуации, такие как внезапное движение пациента. Безопасное расстояние имплантата от жизненно важных структур и медленная подача обеспечивали достаточное время для реакции хирурга. Кроме того, запись пути гарантирует, что хирургические инструменты не повредят мягкие ткани и оставшиеся зубы пациента при автономном входе и выходе ручного инструмента изо рта пациента.
Недостатками процедуры являются необходимость в разработке нескольких персонализированных хирургических аксессуаров до операции, что снижает эффективность планирования. Для решения этой проблемы в будущем могут быть использованы универсальные аксессуары. Калибровка робота и пространственная регистрация до операции требуют дальнейшего упрощения. Устройства робота также занимают пространство в операционной. Для данного пациента точность установки имплантатов с использованием ADIR была удовлетворительной. Однако неизвестно, является ли точность ADIR лучше, чем у статических направляющих и динамической навигации. Необходимы клинические исследования и дополнительные отчеты о случаях для оценки точности ADIR.
РЕЗЮМЕ
Автономный робот для стоматологической имплантации достиг высокой точности установки имплантатов и удовлетворительных результатов для пациента. Однако процесс требует дальнейшего повышения эффективности.
Развитие роботизированной имплантологии продолжает набирать обороты с обещанием дальнейшего улучшения технологий и расширения их возможностей. Исследования и инновации в области материаловедения, искусственного интеллекта и мехатроники обещают сделать процедуры еще более безопасными, эффективными и доступными для широкого круга пациентов.
К сожалению, на момент подготовки руководства автор не имел возможности оценить применение роботизированной имплантологии в клинической практике, поэтому в данном руководстве она не будет рассмотрена подробнее.
Глава 3. История навигационной имплантологии
Ранние методики планирования
Появление имплантологии позволило врачам стоматологам предложить новые варианты лечения пациентам, страдающим адентией. Первоначально имплантаты использовали преимущественно для лечения полной адентии нижней челюсти, на верхней челюсти удержание съемного протеза было лучше, чем на нижней, устанавливая 4—5 имплантата в области подбородка, между ментальными отверстиями, с немедленным протезированием условно съёмным гибридным протезом (литой каркас, гарнитурные зубы, акриловая облицовка), так называемый Шведский протокол.
Открытие принципа оссеоинтеграции расширило показания для имплантации для большинства случаев адентии, были разработаны протоколы протезирования обеих челюстей, в том числе и в случае частичной адентии. Однако анатомические структуры, такие как нижний альвеолярный нерв или верхнечелюстной синус, накладывали ограничения и требовали проводить планирование и выбор имплантата для каждого клинического случая.
Планирование операции проводилось на основе рентгеновского исследования, основным методом являлась ортопантомография, так как этот метод давал обзор всех анатомических образований относительно участка имплантации и имел фиксированное проекционное увеличение 25% для большинства аппаратов, что позволяло достаточно точно определиться с вертикальными размерами.
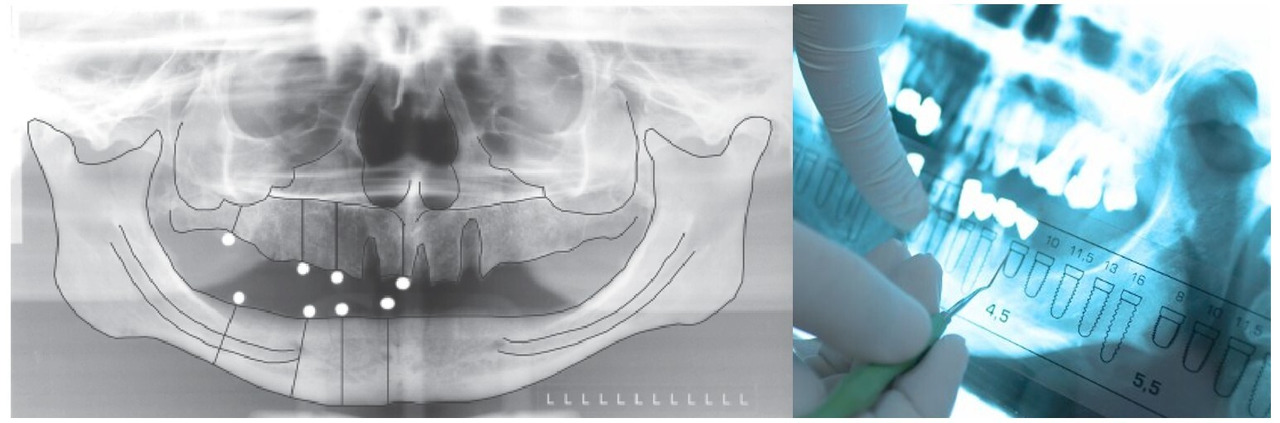
Некоторые производители имплантатов разработали шаблоны из прозрачного пластика, содержащие линейки и изображения имплантатов, увеличенные на 25%, для наложения на пленочную ортопантомограмму или ее трассировку (полупрозрачная бумага (калька) накладывалась на подсвеченную ортопантомограмму, и карандашом обводились все значимые анатомические элементы). Таким образом, клиницист мог подобрать наиболее подходящие имплантаты по длине и определиться с местом и протоколом их установки. Но двухмерная рентгенография не позволяла оценить трехмерную анатомию участка, а тем более провести планирование с учетом будущей ортопедической конструкции.
Аналоговая навигация
История применения шаблонов в имплантологии начинается с основной проблемы имплантологии начального периода, обусловленной тем фактом, что установку имплантата выполнял хирург, ориентируясь на анатомические условия (количество кости, мягкой ткани и др.), а протезирование выполнял врач ортопед, который предъявлял к имплантатам совершенно другие требования (соответствие осей, достаточное для протезирования пространство, расположение в центре коронки замещаемого зуба и тд,). Впрочем, зачастую положение установленных хирургом имплантатов не удовлетворяло ортопеда.
В процессе поиска решения первым шагом была идея изготовить шаблон, который будет передавать хирургу расположение будущих реставраций, чтобы он мог его учитывать, размещая имплантаты. Для этого был предложен так называемый примерный шаблон. Зубной техник выполнял постановку зубов в местах отсутствующих, затем дублировал модель и обтягивал дубликат модели в вакуумформере пластиной из PETG, после чего максимально обрезал оральную часть, стараясь оставить вестибулярную часть планируемых коронок и элементы, обеспечивающие жесткость шаблона. Шаблон стерилизовался и передавался в хирургию.
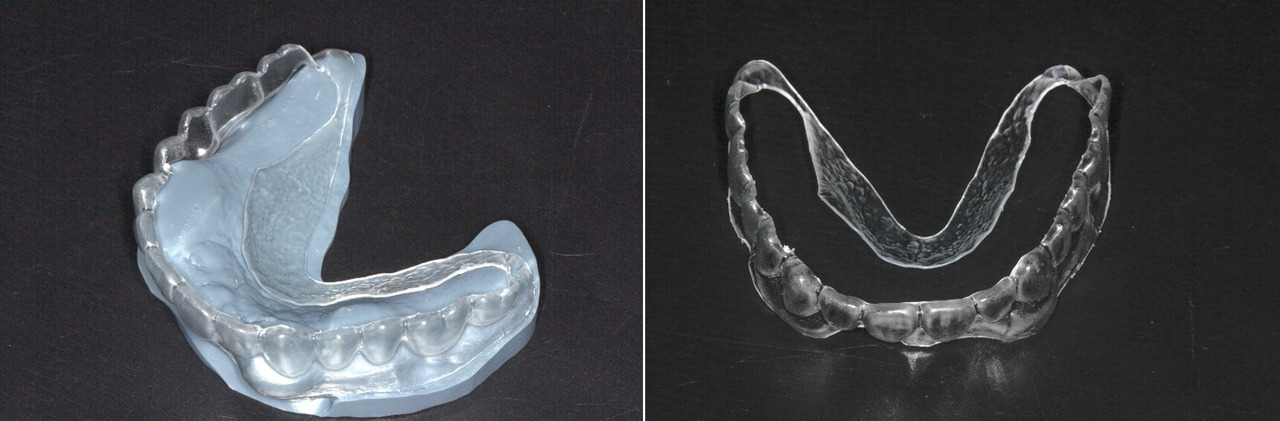
Во время операции хирург мог наложить шаблон пациенту, имея в качестве ориентиров, помогающих представить будущую реставрацию, вестибулярные поверхности, отображенные на каппе, а также имел возможность скорректировать положение имплантата с учетом будущей ортопедической конструкции. Тем не менее, любовь ортопедов к использованию винтовой фиксации диктовала еще более строгие требования к взаиморасположению имплантатов, такие как высокая взаимная параллельность и расположение выходов шахт на оральную поверхность.
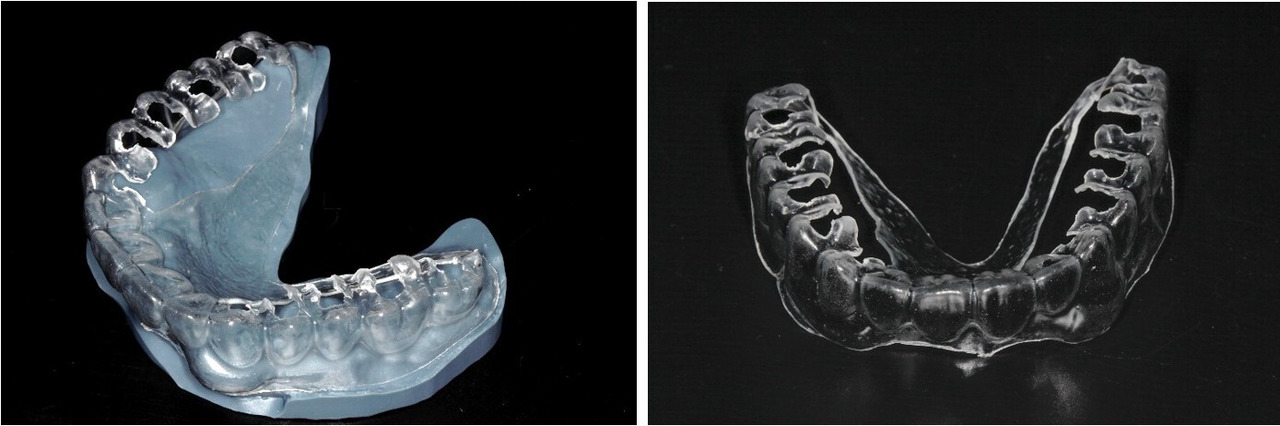
Поэтому была предложена модификация шаблона — центрующий шаблон. В полученной из вакуумформера каппе сначала выполнялись отверстия для пилотного сверления, после чего обрезка проводилась так, чтобы остались не только вестибулярные поверхности реставрации, но и большая часть отверстий для пилотной фрезы.
Таким образом, хирург мог получить не только представление о расположении зубов, но и точное положение центра будущей имплантации, однако все наклоны имплантата оставались на выбор хирурга.
Распространение немедленной нагрузки на имплантаты подняло вопрос о дооперационном изготовлении ортопедической реставрации, однако для решения этого вопроса требовалась технология, позволявшая врачу-ортопеду знать точное положение имплантатов до операции. На помощь пришли «точные шаблоны» или «шаблоны полного протокола» (Full guide), которые применялись не только при подготовке ложа для имплантата, но и при установке имплантата.
Примечательно, что первые точные шаблоны можно было изготовить, не имея не то, что 3D принтера, а даже не имея компьютерной томографии пациента. Одну из первых методик изготовления точных шаблонов вывела на рынок фирма Nobel Biocare. Решение NobelGuide позволяло изготовить точный шаблон двумя путями: аналоговым, для которого требовались только оттиски пациента и рентгенограмма (предпочтительно ортопантомография), и цифровым, для которого необходима была компьютерная томография, сканирование моделей пациента с помощью сканера Nobel Procera, виртуальная моделировка имплантации и удаленное изготовление шаблона в центре производства. Из-за небольшого распространения цифровых технологий в то время, тем более в нашей стране, цифровой протокол в начале не получил широкого применения. Несмотря на то, что для создания шаблона по аналоговому протоколу требовалось немало работы, энтузиасты навигационной хирургии часто использовали его.
Аналоговый протокол изготовления точного шаблона демонстрирует, что при большом желании, даже не располагая технологиями, можно получить желаемый результат.
Для изготовления точного шаблона по аналоговому протоколу, в первую очередь, необходимо было получить костный профиль, для этого зубной техник отливал модель и в области отсутствующих зубов, накладывал восковые полоски от преддверья полости рта до перехода неба в горизонтальное таким образом, чтобы они проходили через центр планируемой установки имплантата, после чего в вакуумформере изготавливалась каппа. На полученной каппе по выступам, оставленным полосками, через пару миллиметров делались отверстия для зонда и маркировались маркером.
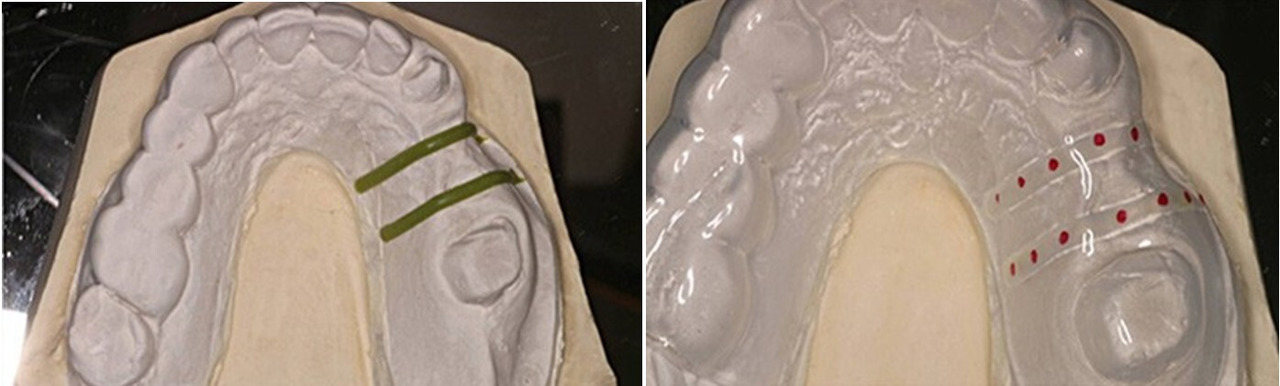
Каппа передавалась в клинику. В клинике, предварительно выполнив обезболивание, врач накладывал каппу пациенту и при помощи зонда и эндодонтического стоппера, прокалывая слизистую оболочку в обозначенных на каппе отверстиях, получал значения толщины слизистой оболочки и записывал их в таблицу, после чего каппа вместе с таблицей возвращалась в лабораторию.
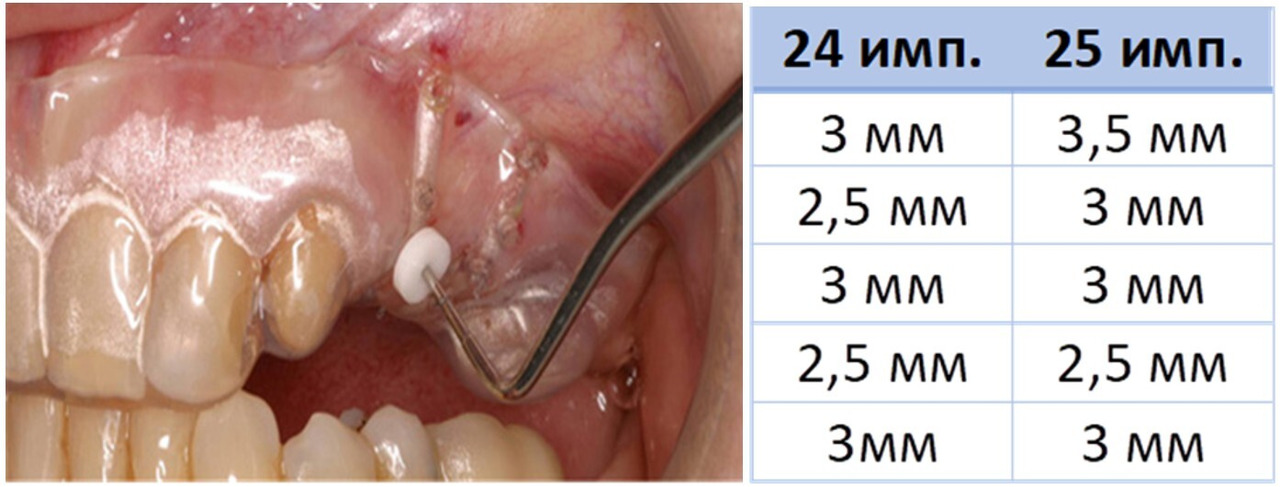
Модель расчерчивалась и распиливалась, на боковой поверхности полученных фрагментов отмечались данные из таблицы и прорисовывался костный профиль, после чего гипс, соответствующий мягким тканям, спиливался фрезой и получалась модель костного профиля.
Длина имплантата определялась по ортопантомограмме или прицельному снимку, а диаметр определялся при изучении костного профиля. После чего в модель монтировался аналог подходящего имплантата, для этого выполнялось сверление, и аналог закреплялся в нем гипсом или самотвердеющей пластмассой.
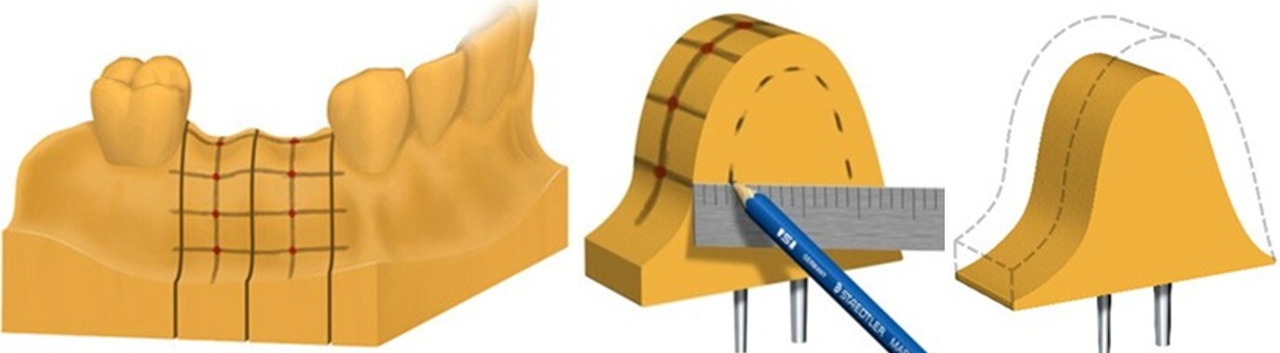
Затем модель собиралась, и при помощи оттиска, силиконового ключа или имеющейся каппы изготавливалась десневая маска. Таким образом, еще до установки имплантатов, мы получали модель для подготовки протетических компонентов реставрации. Модель и протетические компоненты готовы, осталось перенести положение имплантатов с модели пациенту.

Для этого использовалась комбинация: переходник, навигационное кольцо и фиксирующий винт. Они фиксировались на аналогах имплантатов, после чего из самотвердеющей пластмассы формировался шаблон. По окончании полимеризации шаблон снимался с модели, обрабатывался и передавался в клинику вместе с заранее подготовленными абатментами и коронками. Эта техника требовала много труда и большой кропотливости, но, тем не менее обеспечивала возможность подготовки протетических компонентов (абатменты и коронки) до проведения хирургического этапа имплантации, а также являлась инструментом, позволяющим расположить имплантаты точно в запланированную позицию.


Опыт применения аналоговой навигации
Оценить возможности аналогового метода навигации можно, изучив клинический случай, который любезно предоставила клиника «Руссдент»; этот клинический случай выполнил ведущий хирург имплантолог клиники Хатит Руслан Айдамирканович в 2009 году.
Пациентка 43-х лет обратилась в клинику с жалобами на отсутствие нижнего второго премоляра слева. В рамках диагностики проведена оценка общего и стоматологического анамнеза, выполнен стоматологический осмотр. По результатам диагностики проведена консультация, и из предложенных методик протезирования пациентка предпочла установку имплантата с последующим протезированием коронкой с опорой на имплантат.

При подготовке к имплантации была выполнена панорамная рентгенография (ОПТГ), получены оттиски обоих челюстей пациента и изготовлены модели. В полости рта определена толщина мягких тканей в области имплантации, построен костный профиль. На модели в области отсутствующего зуба из воска отмоделирован прототип будущей реставрации. С модели нижней челюсти получен силиконовый ключ для последующего изготовления десневой маски. Модель распилена по центру планируемой установки имплантата, после чего размечена планируемая позиция имплантата, и согласно ей выполнено сверление при помощи параллелометра, после чего установлен аналог имплантата.
С модели удален гипс, соответствующий мягким тканям, чтобы получился так называемый костный профиль, после чего десневая часть восстановлена обратно в виде десневой маски при использовании полученного заранее силиконового ключа. Таким образом, получена модель с аналогом имплантата, еще до проведения имплантации. На этой модели подготовлена провизорная реставрация, в данном случае это пластиковая коронка с винтовой фиксацией, также подготовлен шаблон.
Для изготовления шаблона с помощью термоформирования подготовлена назубная каппа, в области имплантации в нее вклеена втулка для пилотного сверления, при помощи самотвердеющей пластмассы. Позиция втулки определена по длинному винту, установленному в аналог имплантата. Таким образом, до операции получен навигационный шаблон для пилотного сверления и временная реставрация.
Под местным обезболиванием провели хирургическое вмешательство по поводу установки имплантата. Для проведения пилотного сверления использован подготовленный заранее шаблон, после выполнено расширение остеотомического канала при помощи остеотомических фрез согласно выбранному протоколу и выполнена установка имплантата. К установленному имплантату адаптирована и фиксирована временная коронка, изготовленная заранее.
На послеоперационном снимке мы видим удовлетворительное положение имплантата. Как видно из данного клинического случая, получение хороших результатов имплантационной хирургии и последующего протезирования — результат тщательной подготовки и серьезного отношения к делу. И, даже не располагая цифровыми инструментами, фанаты своего дела передовые клиницисты, получали хорошие результаты даже 20 лет тому назад.
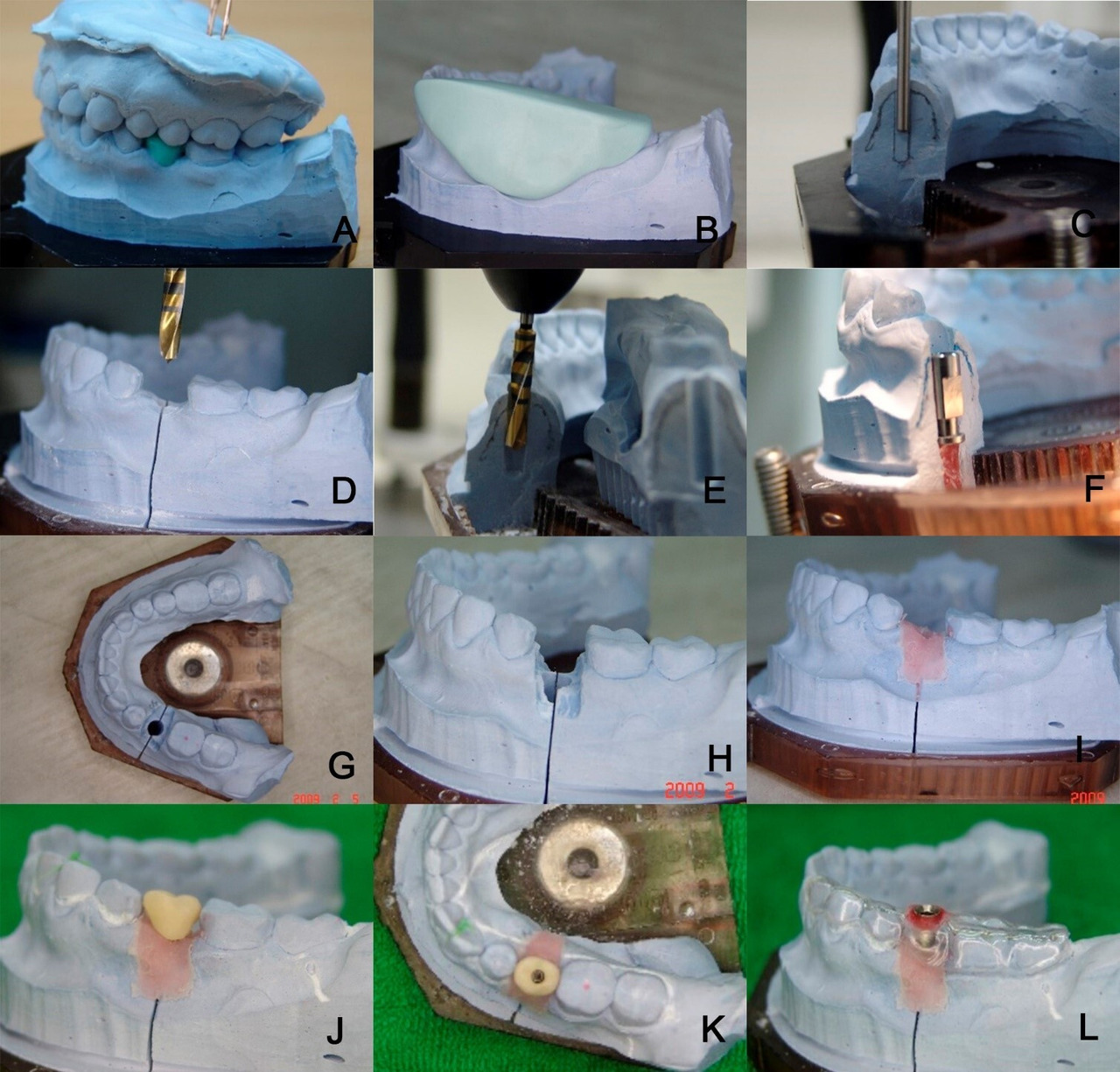
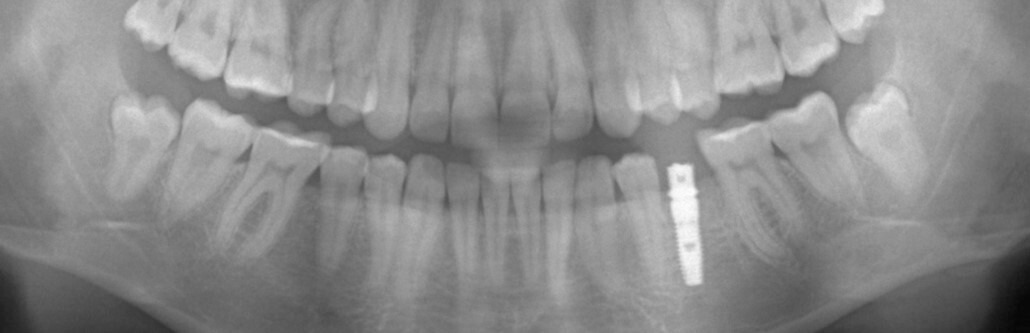
Цифровая навигация
Появление технологии спиральной томографии стало ключевым моментом для дальнейшего развития имплантологии, так как позволило получать точные и четкие изображения во всех проекциях. Параллельно с популяризацией компьютерной томографии к 1990 году стали очень популярными программные решения для стоматологии, такие как программное обеспечение «Dentascan». Оно позволяло получать поперечные изображения каждые 2 мм и панорамные срезы. Более того, программное обеспечение Simplant интегрировало интерактивный анализ в программу и добавило возможность проведения виртуальной хирургии, а также визуализации позиции имплантата в 3D-графике.
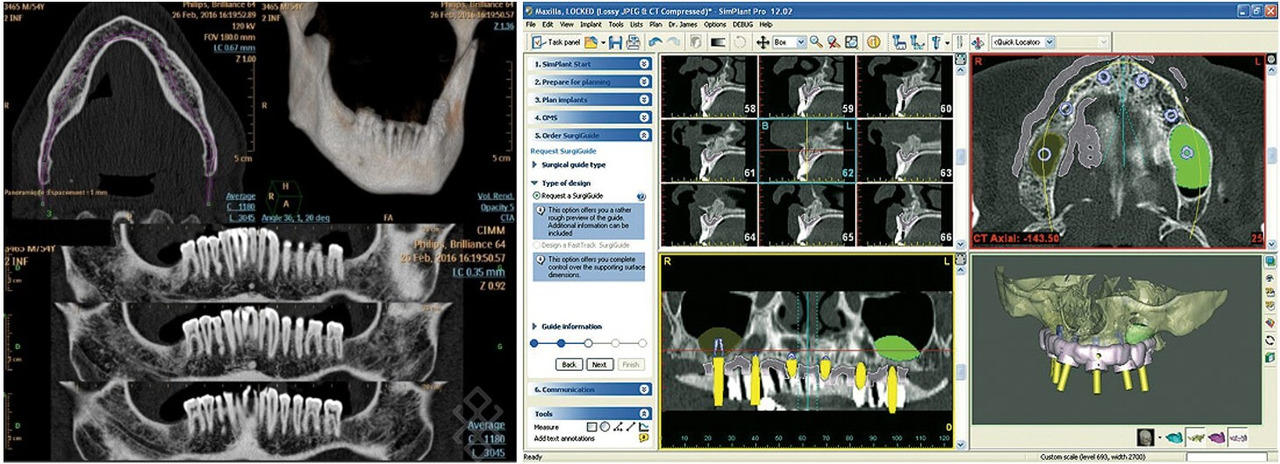
Следующим вызовом после виртуального планирования стала разработка методики передачи виртуальной информации непосредственно в клинику. Американская компания Implant Logic System в сотрудничестве с Simplant разработала методику проведения рентгенографии со стандартным рентгенологическим шаблоном, содержащим металлические метки, который крепился к зубам с помощью самотвердеющей пластмассы, после чего проводилась спиральная компьютерная томография. Используя полученные результаты, хирург мог планировать размещение имплантатов в программном обеспечении Simplant, а компания Implant Logic System могла централизованно производить направляющие втулки для остеотомии, крепящиеся на адаптированный стандартный шаблон.
Эта система является примером централизованного изготовления шаблонов, в таких случаях изготовление шаблонов нужно рассматривать как сервис, что с одной стороны менее затратно для клинициста и не требует длительного обучения, а с другой стороны цена и скорость изготовления шаблона всегда оставляют желать лучшего. Тем не менее этот процесс был сложен для ежедневного применения в клинике, и его применение было прекращено, а фирма Implant Logic System приобретена фирмой Biohorizont.
Следующим решением, появившимся на рынке навигационных шаблонов, стало решение, предложенное компанией Med3D в 1994 году, это решение опиралось уже на планирование по 3х мерному снимку, полученному со спирального компьютерного томографа либо конуснолучевого компьютерного томографа. Так как никакого сканирования полости рта или моделей не предусматривалось, использовалась методика рентгенографии с рентгеновским шаблоном.
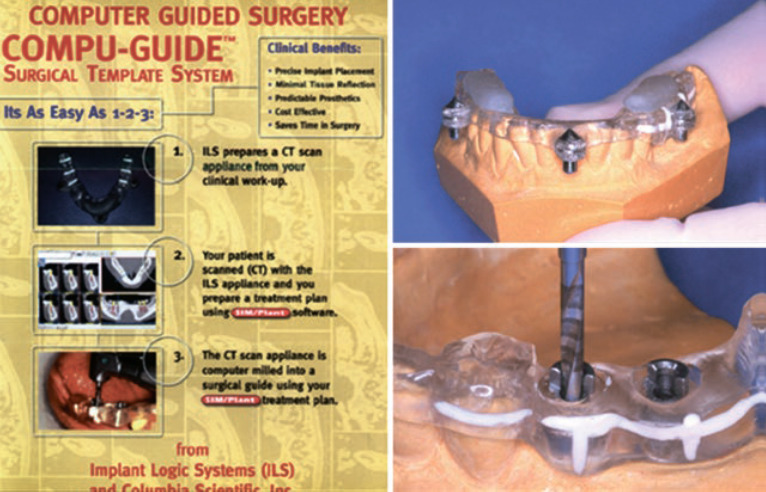
Рентгеновский шаблон, заранее выполненный на модели из самотвердеющей пластмассы с добавлением сульфата бария для рентгеноконтрастности, должен был точно и однозначно позиционироваться как на модели, так и в полости рта, содержать ренгенопаковые зубы на месте отсутствующих зубов, а на месте замещаемых и в области неба или над языком содержать в себе кубик LEGO 2x3. Да, именно кубик LEGO являлся ключевым элементом этой системы, точкой отсчета, позволяющей соотносить реальные и виртуальные измерения.
В связи с отсутствием в этой методике объединения данных рентгенографии и поверхностного сканирования для передачи рельефа нерентгеноконтрастных тканей (мягкие ткани) применялась рентгенография с рентгеноконтрастным рентгеновским шаблоном; именно он создавал контур мягких тканей. Также установив на рентгеновский шаблон рентгеноконтрастные пластиковые зубы, можно было передать в рентгенограмму позицию будущей коронки. Варьировать рентгеноконтрастностью элементов шаблона можно путем добавления разного количества сульфата бария в самотвердеющую пластмассу.
Все планирование выполнялось в программном обеспечении, а для изготовления физического шаблона использовался фрезерный станок Shick X1, оснащенный столиком на гексаподе, его шесть ножек представляли собой микрометры, значение которых рассчитывала программа для каждого сверления, каждой втулки.
После настройки всех микрометров, в том же ренгенологическом шаблоне выполнялось сверление и вклеивалась втулка, потом микрометры перенастраивались, сверлилась и вклеивалась следующая втулка. Втулки были для пилотного сверления 2 мм диаметром и для полного протокола.
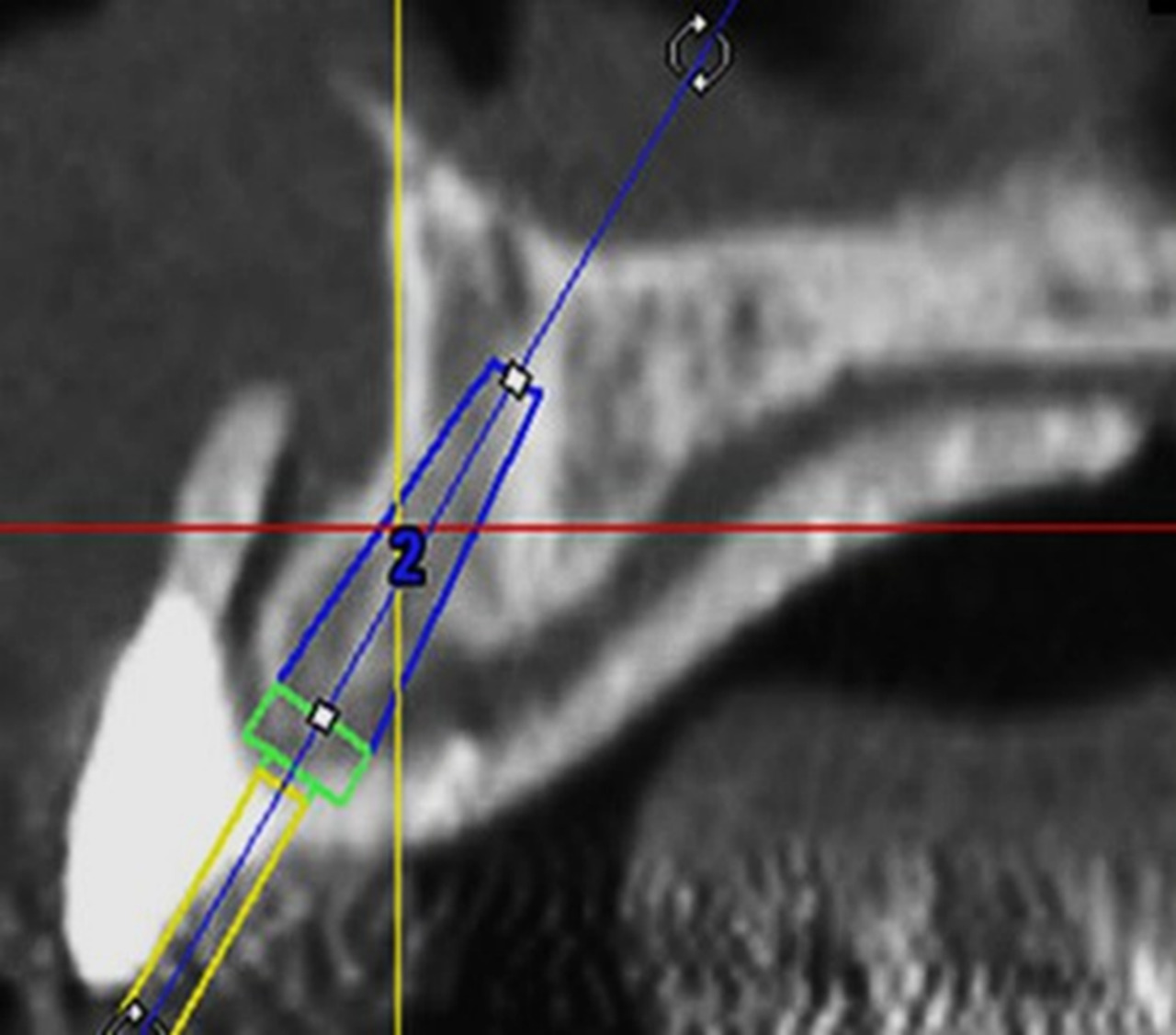
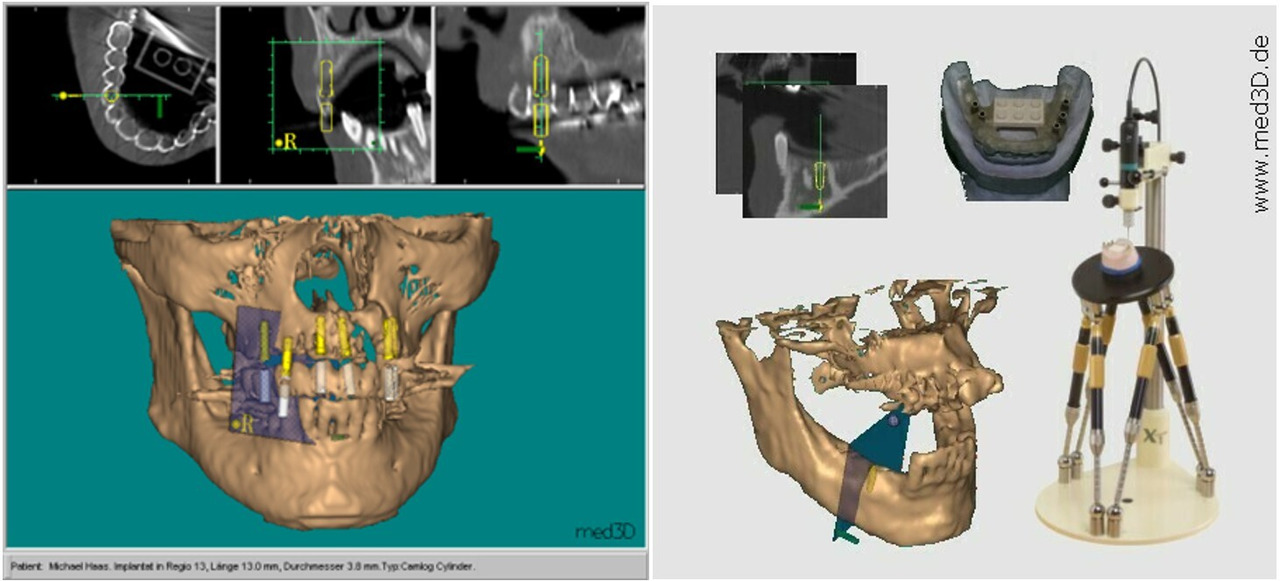
Это решение значительно упрощало изготовление навигационных шаблонов и было приобретено несколькими фирмами и продвигалось под их брендом. Нам в клинике выпала возможность поработать с этой технологией, продвигаемой компанией MIS как ранний вариант MIS MGuide.
Опыт применения технологии MED 3D
Med3D можно продемонстрировать на клиническом случае, выполненном в клинике «Дентик Люкс» на оборудовании MIS MGuide.
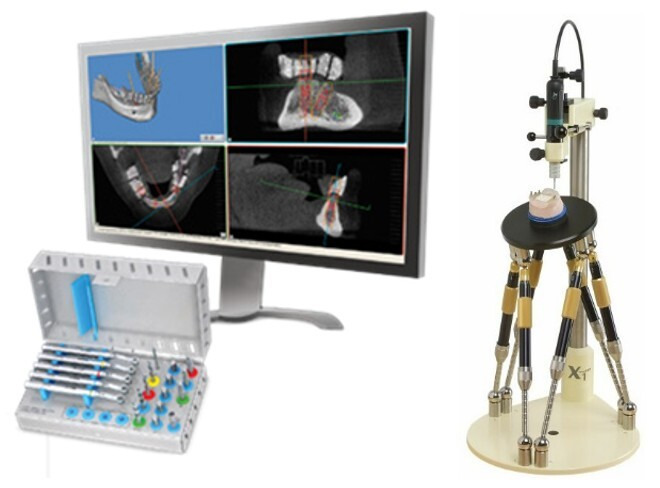
В декабре 2010 года в клинику обратился мужчина 58 лет с полной потерей зубов на верхней челюсти с целью выполнить реабилитацию несъемным протезом с опорой на имплантаты. В рамках подготовки к вмешательству, путем дублирования имеющегося съемного протеза, был изготовлен рентгеновский шаблон и выполнена конусно-лучевая компьютерная томография с шаблоном. Все данные были загружены в программное обеспечение MIS MGuide. У данного пациента, наряду с хорошим костным предложением в области клыков и премоляров, наблюдалось резкое снижение толщины альвеолярного гребня в области фронтальных зубов, недостаточная высота в области верхнечелюстных пазух и не полностью минерализованная кость в области постэкстракционных лунок зубов.
Решено было установить 6 имплантатов в области 15,14,13,23,24,25 зубов, использовав так называемый франфуртский протокол, позволяющий избежать синуслифтинга и фронтальной зоны с недостаточной толщиной альвеолярного отростка. Следуя анатомии альвеолярного отростка верхней челюсти, решено расположить имплантаты с ангуляцией 15 градусов, для использования стандартных 15-градусных абатментов, после установки имплантатов выполнить временное протезирование, используя временные PPEK абатменты и имеющийся у пациента съемный протез. По завершению интеграции имплантатов провести протезирование полнодуговым металлокерамическим мостовидным протезом 16—26 с цементной фиксацией.

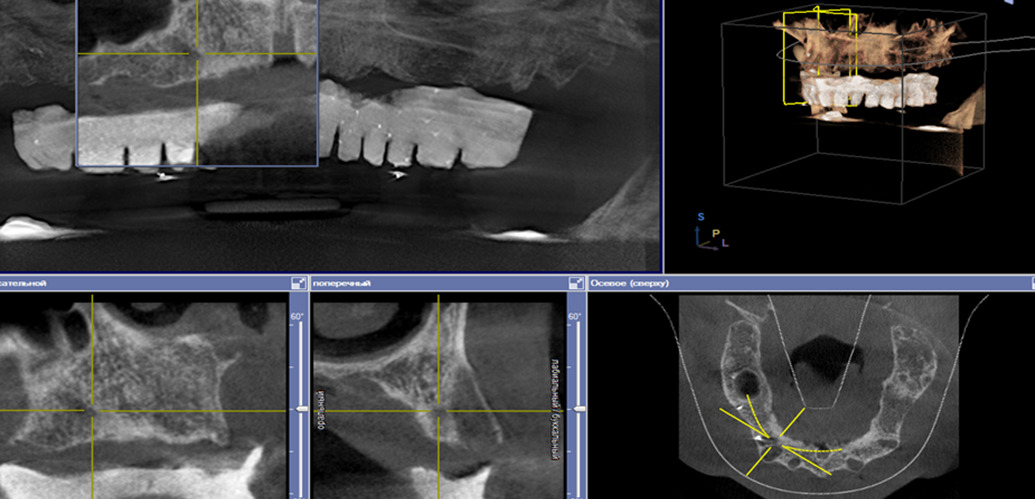
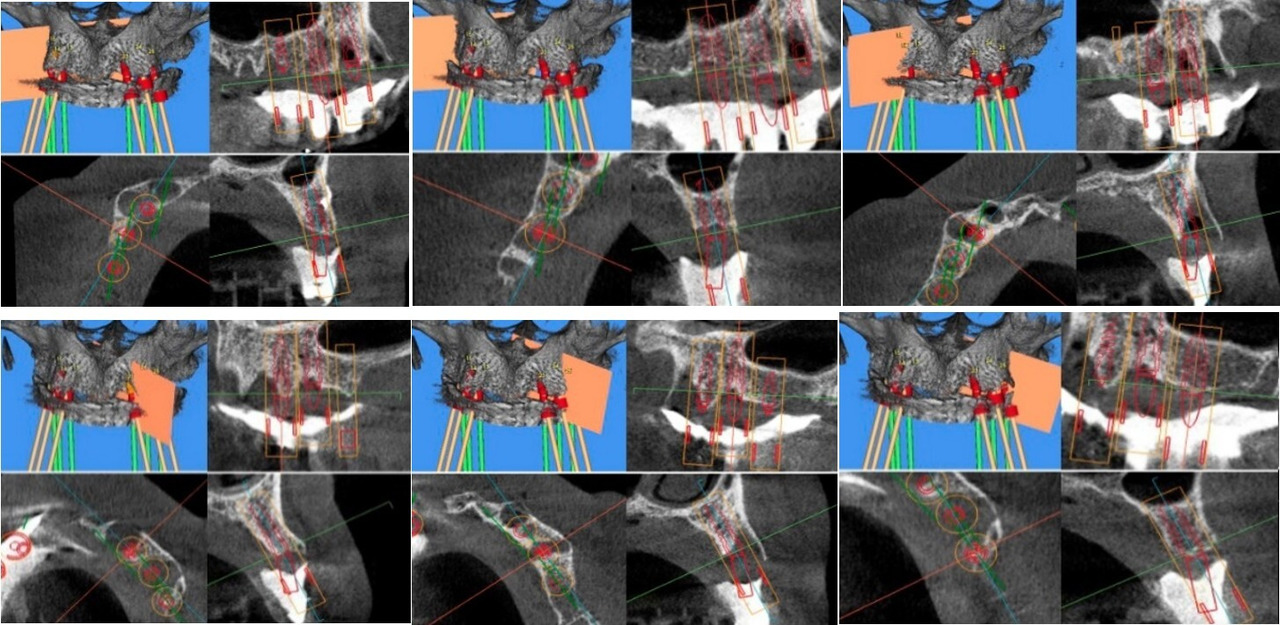
По окончании планирования, были рассчитаны координаты для гексапода, и рентгеновский шаблон переведен в хирургический, в него установлены втулки, удалены элементы, мешающие манипуляциям, созданы инспекционные окна. Шаблон стерилизован холодным способом и передан в клинику.
После выполнения адекватной анестезии, шаблон наложен на верхнюю челюсть пациента, проверено его однозначное расположение, достоверными признаками которого можно считать отсутствие подвижности и зазоров между шаблоном и слизистой полости рта пациента. Далее была выполнена установка имплантатов по полному протоколу от формирования безлоскутного доступа до окончательного позиционирования имплантатов через шаблон.
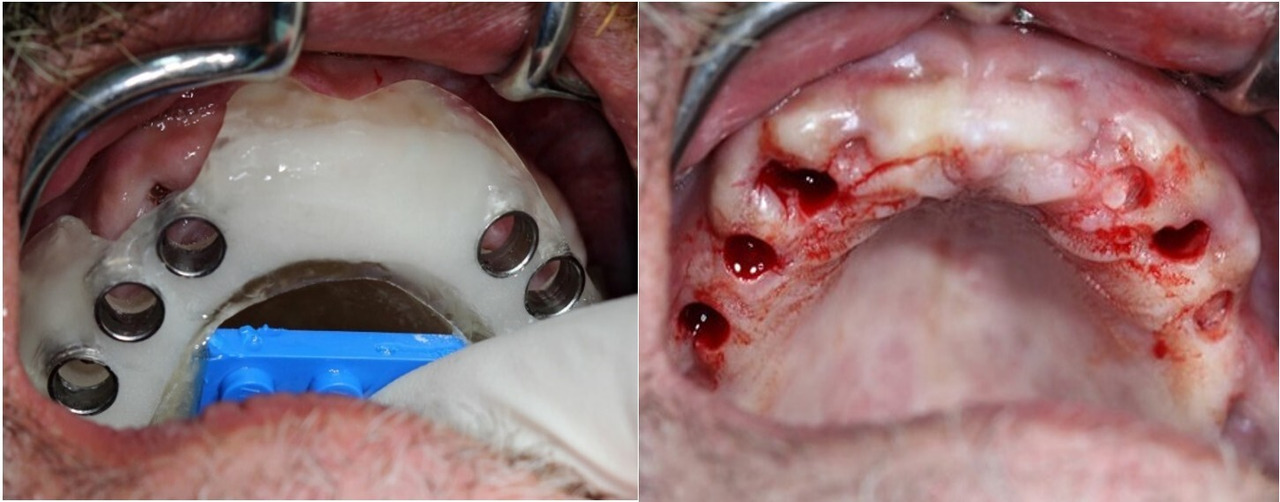
Выполнив создание безлоскутного доступа мукотомом, шаблон временно снят, распатором удалены сепарированные фрагменты слизистой, шаблон установлен на место. Препарирование остеотомических каналов проведено фрезой диаметром 2.0 мм. Шаблон жестко фиксирован с помощью винтов, расположенных в каналах 14 и 24 имплантата. Проведена остеотомия согласно стандартному протоколу, с использованием переходных ручек. Также при использовании имплантоводов для шаблонной техники установлены имплантаты.
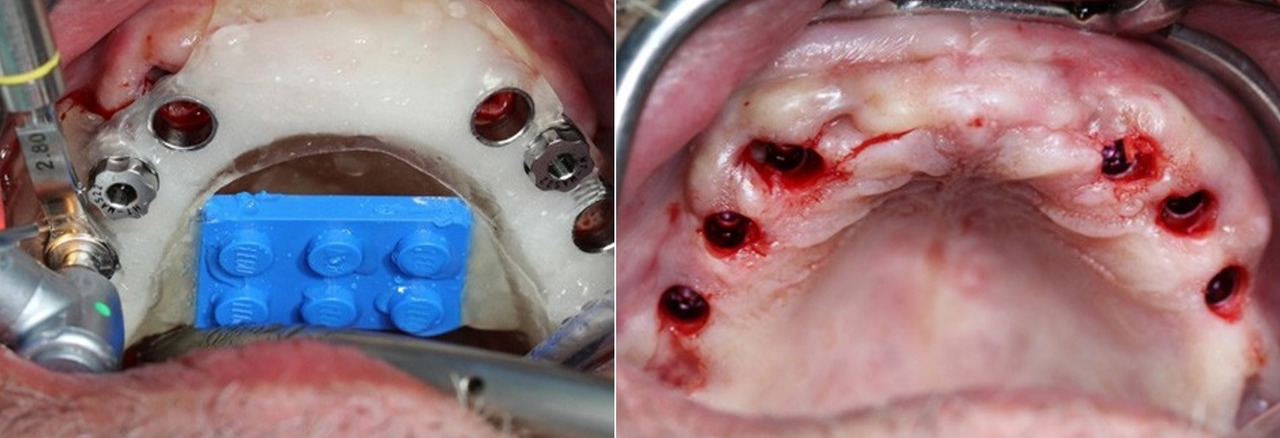
Временная реабилитация выполнена имеющимся у пациента съемным протезом, закрепленным с помощью самотвердеющей пластмассы к временным PEEK абатментам.
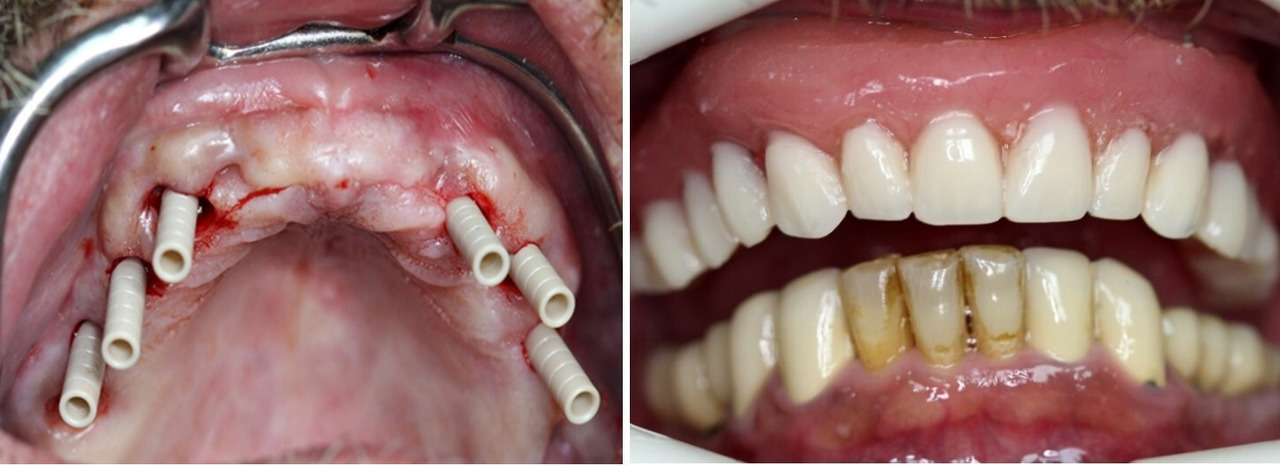
Послеоперационное заживление и период интеграции прошли без особенностей. Спустя 4 месяца приступили к постоянному протезированию. Демонтировав съемный протез, фиксированный к временным абатментам, оценили стабильность имплантатов и состояние мягких тканей. Стабильность оценена с помощью аппарата Periotest, все значения свидетельствуют о полной интеграции. Мягкие ткани в норме. Однако не сформирована фестончатость для несъемного протезирования.
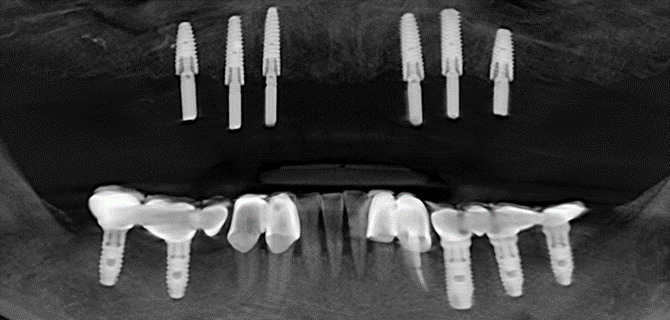
Затем получили оттиски методикой закрытой ложки, заказали в лаборатории индивидуализацию постоянных 15-градусных абатментов и провизорный мостовидный протез из PMMA для проверки эстетики и функции перед постоянным протезированием.






Оценив эстетику и функцию при помощи прототипа протеза из PMMA и учтя пожелания пациента, перешли к изготовлению постоянного металлокерамического протеза.
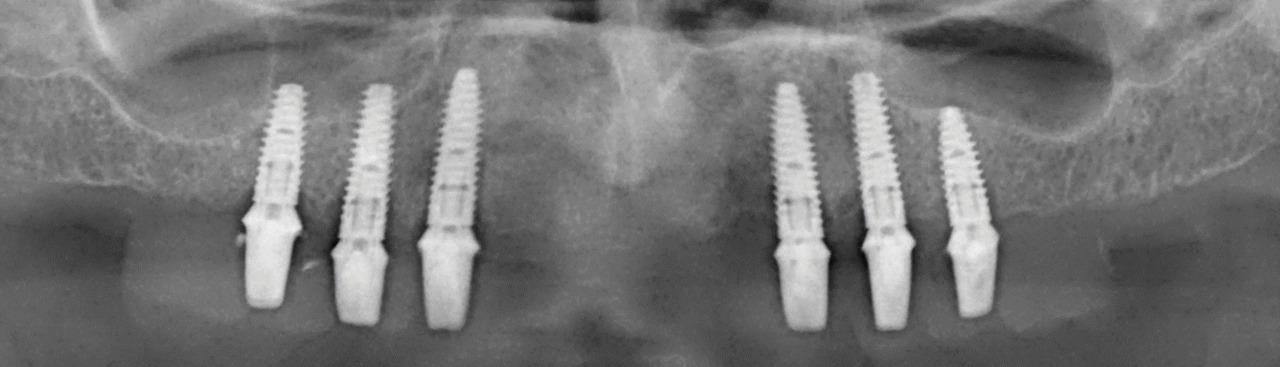


Как видно из этого случая, даже использование старых методик навигационной хирургии позволяло достичь хороших клинических результатов. При всем при том, технологии постоянно совершенствовались, предоставляя врачам больше новых возможностей и делая процедуру все менее трудоемкой.
Развитие технологий
Хорошие результаты, получаемые при применении навигационной имплантационной хирургии, наряду с постоянными запросами клиницистов на снижение сложности изготовления шаблона подвигли бельгийскую фирму Materialise, объединившись с Simplant, разработать методику создания накостного шаблона для навигационной хирургии, изготовленного на стереолитографической модели, отпечатанной на 3D-принтере. Этот метод, который компания назвала «быстрым прототипированием», увеличил точность изготовления шаблонов и открыл новый мир возможностей благодаря получению модели кости непосредственно из DICOM-файлов.
В России одной из первых компаний, предоставивших российским имплантологам цифровое решение, была компания «Центр Дентальной Имплантации» с программным обеспечением Implant-Assistant, которая предлагала услуги по планированию имплантации и изготовлению стереолитографических моделей челюстей и стереолитографических навигационных шаблонов для установки имплантатов. Использовалась технология, предложенная компанией Simplant: по результатам спиральной томографии выполнялась сегментация и получалась модель кости челюсти, она могла быть распечатана, а также мог быть изготовлен накостный шаблон для установки имплантатов.
Опыт применения технологии Implant-Assistant
Клинический случай применения Implant-Assistant на практике любезно предоставил Хатит Руслан Айдамирканович ведущий хирург-имплантолог клиники «Руссдент».
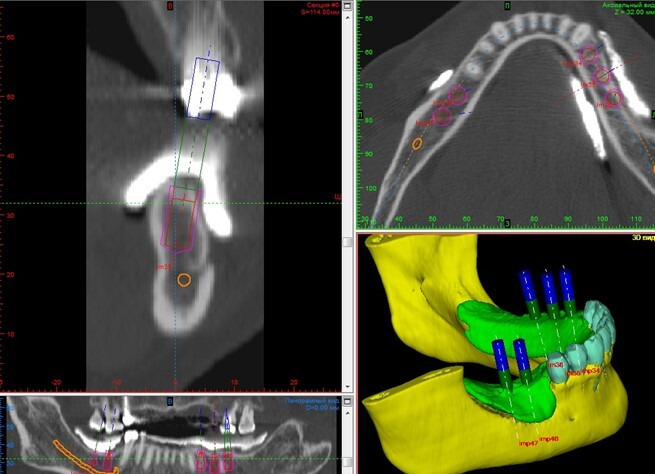
Пациентка 63-х лет обратилась в клинику для реабилитации по поводу двухстороннего концевого дефекта нижней челюсти. После осмотра и рентгенологического обследования проведена полная консультация пациентки, в результате которой пациентка выбрала протезирование концевых дефектов нижней челюсти мостовидными протезами с опорой на имплантаты. Решено использовать накостные навигационные шаблоны, подготовленные Implant-Assistant.
В рамках подготовки к операции пациентке изготовлен индивидуальный рентгеновский шаблон — контрастная каппа, надеваемая на нижнюю челюсть в области отсутствующих зубов и огибающая зубы, ее использование позволяет передать объем слизистой оболочки. Выполнена спиральная компьютерная томография с наложенным рентгеновским шаблоном, после чего результаты томографии отправлены в Implant-Assistant.
Коллектив Implant-Assistant создал виртуальный план, и после согласования была напечатана стереографическая модель фрагмента нижней челюсти, и два навигационных шаблона под 2мм стальную втулку для пилотного сверления, для левой и для правой половины челюсти раздельно. Созданные навигационные шаблоны комбинированные, сочетают опору на слизистую оболочку в области остеотомии имплантатов, а также опираются на часть оставшихся у пациента зубов.
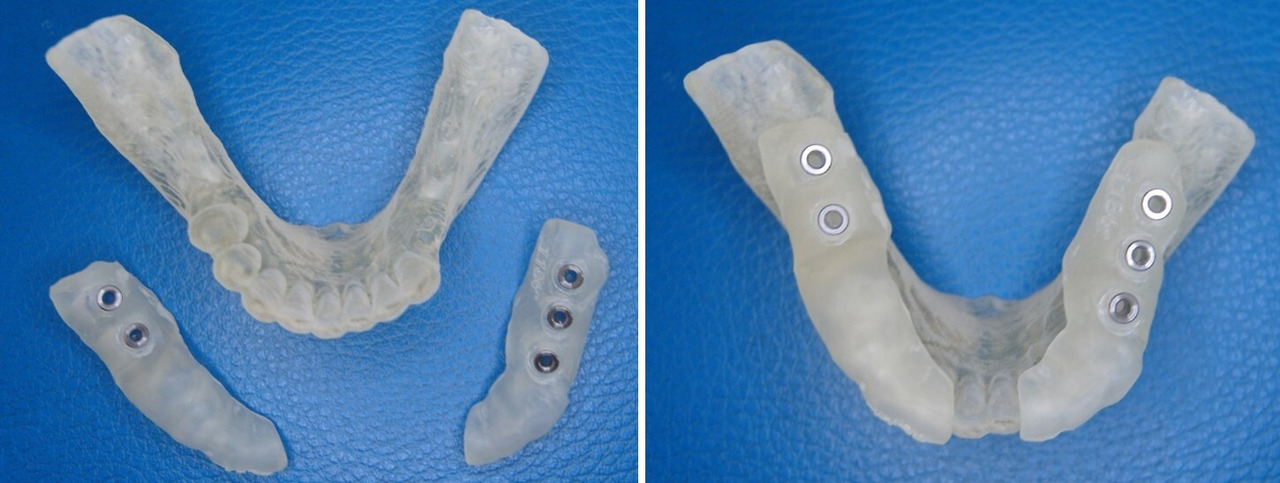
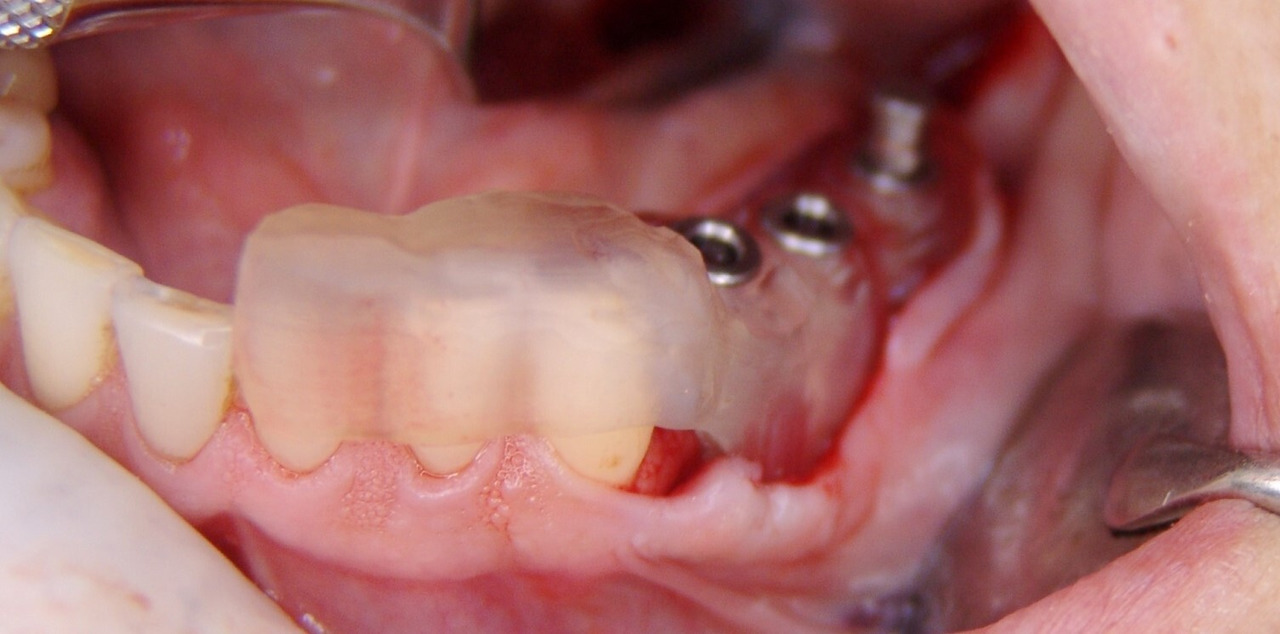
Хирургическое вмешательство проведено под проводниковой анестезией, выполнено широкое открытие операционного поля, полное обнажение альвеолярного гребня для того, чтобы разместить накостную часть шаблона. После чего выполнено пилотное сверление, и шаблон удален. Далее по выбранному протоколу расширены остеотомические каналы и установлены имплантаты. На послеоперационной ортопантомографии мы видим удовлетворительный результат расстановки имплантатов.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.